Cụ ơi thông tin quảng cáo là vậy thôi chứ thật ra phải xem lại kỹ về cơ cấu truyền động để nhận ra các thuật ngữ "đẹp đẽ" của dân Marketing họ viết. Sự khác biệt của full-time hay on-demand không nằm ở cái thời gian đáp ứng, mà ở vấn đề on-demand chỉ hoạt động sau khi bánh trước bị trượt, còn full-time hoạt động mọi lúc. Vì thế nên on-demand vẫn bị "thiếu lái" (understeer), chỉ có điều là sau khi thiếu lái, máy tính sẽ phát hiện và cứu hộ. Còn full-time luôn chủ động. Trong vật lý không có khái niệm giảm độ bám, chỉ có thời điểm "mất độ bám" khi ma sát nghỉ chuyển thành ma sát trượt. Mấy ông làm nghề marketing viết cho hoa mỹ thôi.Intelligent 4WD mà cụ bảo nó thua 4WD của Everest thì em thấy cụ dìm hàng Explorer hơi bị kinh đấy
Theo em hiểu thì cái Intelligent 4WD của Ford nó phân phối momen một cách linh hoạt đến từng bánh xe, khi một hoặc nhiều bánh xe bị mất độ bám, momen sẽ được dồn cho các bánh còn lại, tương tự như Symmetrical 4WD của Subaru, 4matic của Mẹc hay 4xMotion của VW.
Tốc độ đáp ứng của Intelligent 4WD theo Ford quảng cáo là dưới 16ms nên coi nó là AWD theo em cũng chả sai đâu ạ: http://www.southwayford.com/blog/how-does-ford-intelligent-4wd-system-work/
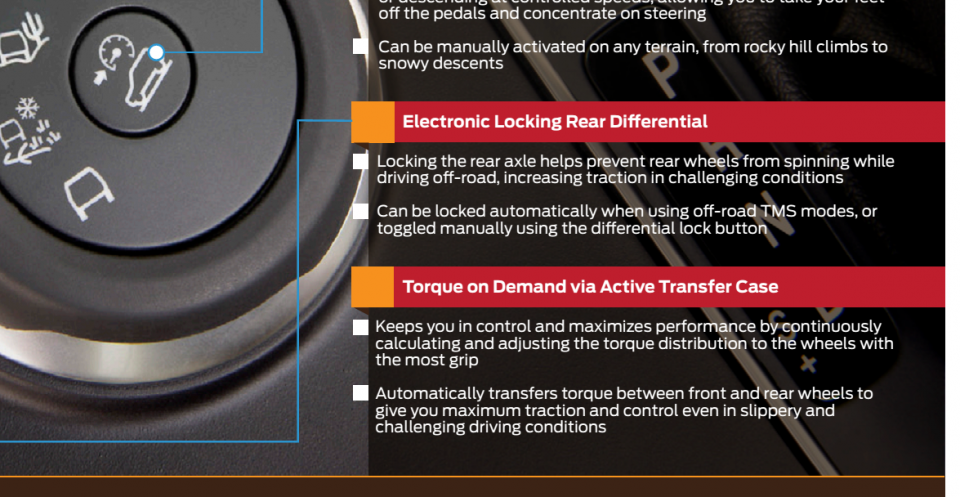
Còn cái 4WD của Everest, nó truyền momen theo tỉ lệ 60/40 cho cầu trước và cầu sau, và nó có thêm cái chức năng khoá vi sai cầu sau để có thể phân phối momen linh hoạt cho 2 bánh sau trong những tình huống khó, chẳng hạn như trường hợp 2 bánh trước và 1 bánh sau bị trượt, cần dồn hết momen của cầu sau cho bánh còn độ bám. Tuy nhiên phải dừng hẳn xe lại mới lock được chứ ko tự động một cách tức thời như Intelligent 4WD (16ms). Everest cũng chỉ có khoá vi sai cầu sau chứ không có khoá vi sai trung tâm như mấy ông Offroad chuyên nghiệp (phân phối momen linh hoạt giữa 2 cầu).
Cái Terrain Management System thì giờ Everest mới có chứ Explorer nó có từ rất lâu rồi, Everest hơn cái là có cầu chậm giúp truyền momen nhiều hơn nhưng theo em nghĩ, Intelligent 4WD nó đã có khả năng dồn momen cho bánh xe còn độ bám rồi thì cũng chả cần cầu chậm làm gì
Thứ hai nữa là sự khác biệt nằm ở điểm mấu chốt nhất: full-time tự thân nó là truyền động trực tiếp bằng các cơ cấu "cứng", nên có thể chạy bằng 4 bánh cả ngày không sau. On-demand hoạt động bằng cơ cấu ly hợp nên sự ma sát trong bộ ly hợp sẽ gây quá nhiệt nếu hoạt động dài hoặc điều kiện khắc nghiệt.
Cái phân bố lực kéo mà cụ nói thì nó là Traction Control, và Everest có ạ, chứ ko phải khóa cứng 60-40 như cụ nói. Bản chất của nó vẫn phải phụ thuộc vào loại 4WD của xe, vì xe không có hệ thống dẫn động độc lập từ động cơ tới từng bánh sau, mà vẫn phải thông qua trục các-đăng, rồi mới phân phối tới các bánh. Vậy nên quy trình xử lý trường hợp mất độ bám của Ex hay các xe Intelligent 4WD, hoặc tất cả các loại on-demand là:
Mất độ bám -> Báo về máy tính -> Chỉ đạo kích hoạt -> Truyền lực ra bánh sau -> Truyền về từng bánh.
Với xe full-time thì cắt được cái khoản chờ truyền ra bánh sau.
Còn Everest là xe có khóa vi sai trung tâm tự động ạ. Bây giờ các xe hiện đại đều vậy, chỉ có xe đời cổ hoặc thiết kế đặc chủng để người lái quyết định toàn bộ như Mercedes G mới có khóa vi sai trung tâm bằng tay.
Terrain Management System là các chế độ kiểm soát độ nhạy bướm ga, thời gian sang số và quyết định có cho trượt bánh hay không, không ảnh hưởng gì đến hệ 4WD ạ.
Tóm lại là thế này: Intelligent 4WD thì nó tiết kiệm xăng và đỡ mòn lốp, nhưng nó là anh công tử hào hoa, không cho lội ruộng được. Còn Ev thì nó tốn dầu tốn lốp hơn, nhưng nó là một thằng có thể đi bất cứ đâu được. Thật là thế đấy ạ.
Không có gì là đẳng cấp hay không đẳng cấp ở đây, chỉ là khác nhau mục đích thiết kế. Ex là xe đô thị có trang bị on-demand để cải thiện tính năng vận hành, chữa "thiếu lái" và vượt các đoạn lầy lội ngắn. Everest là xe 4WD off-road tầm trung.
Bonus:
Các cụ cũng không phải lăn tăn nhiều về cảm giác Ex bị dìm hàng đâu, vì crossover giờ chắc phải 70% là on-demand. Còn quattro của Audi, 4Motion của Merc, với sym (không phải tất cả) của Subie thì nó nằm ở mâm trên rồi, bọn làng nhàng như Intel 4WD của Ford hay SH-AWD của Honda không so được đâu ạ, nó khác nhau ở chỗ một thằng là AWD thực, một thằng là on-demand và cách phân phối lực. Khi nào đỡ mỏi tay em sẽ nói thêm.
Có cái clip test độ bám giữa Subie (AWD thực) và Volvo (ondemand) gửi cụ:
Chỉnh sửa cuối:
)")