
hình ảnh cánh đồng thật đẹp và bình yên!
[Funland] Thảo luận về nước Nga, phần 7 (Vol 7) - Không bàn chuyện chính trị
- Thread starter langtubachkhoa
- Ngày gửi

- Trạng thái
- Thớt đang đóng

- Biển số
- OF-523455
- Ngày cấp bằng
- 25/7/17
- Số km
- 7,380
- Động cơ
- 325,369 Mã lực
- Nơi ở
- Www.Schlagevietnam.com
- Website
- www.schlagevietnam.com
e thì chả care gì thằng Nga cho lắm, nó chả có ảnh hưởng mọe gì đến VN cả. Tất cả các sp e đang dùng chả có gì của Nga thì việc quái gì e phải đọc tin tức về nó nhỉ.

- Biển số
- OF-626585
- Ngày cấp bằng
- 24/3/19
- Số km
- 8,426
- Động cơ
- 310,264 Mã lực
Một nghiên cứu rất phù hợp với thời đại xanh, được đăng trên tạp chí nghiên cứu khoa học quốc tế uy tín. Nó đây
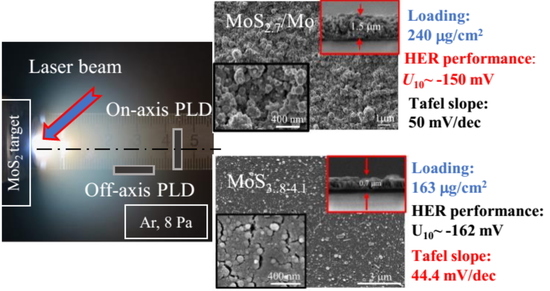
Comparative Study of the Structure, Composition, and Electrocatalytic Performance of Hydrogen Evolution in MoSx~2+δ/Mo and MoSx~3+δ Films Obtained by Pulsed Laser Deposition
 www.mdpi.com
www.mdpi.com
 doi.org
Nanomaterials 2020, 10(2), 201
doi.org
Nanomaterials 2020, 10(2), 201
Các nhà khoa học Nga đã phát triển một phương pháp mới để sản xuất hydro từ nước

Các chuyên gia từ Viện Công nghệ Laser và Plasma của Đại học Hạt nhân Nghiên cứu Quốc gia MEPhI (LaPlaz Institute of the National Research Nuclear University MEPhI) đã phát triển các chất xúc tác mới thân thiện với môi trường để sản xuất hydro từ nước, cũng như vật liệu để lưu trữ và vận chuyển. Theo các nhà nghiên cứu, điều này sẽ làm cho năng lượng hydro rẻ hơn, xanh hơn và an toàn hơn. Kết quả của nghiên cứu được công bố trên tạp chí nghiên cứu khoa học quốc tế Nanomaterials.
Comparative Study of the Structure, Composition, and Electrocatalytic Performance of Hydrogen Evolution in MoSx~2+δ/Mo and MoSx~3+δ Films Obtained by Pulsed Laser Deposition
www.mdpi.com
doi.org
Nanomaterials 2020, 10(2), 201
Một trong những phương pháp đơn giản nhất để sản xuất hydro là điện phân - sự tách nước dưới tác động của dòng điện. Để thực hiện quá trình này một cách hiệu quả, cần phải có các điện cực mới, bao gồm các vật liệu rẻ tiền, các thành phần của chúng phải phổ biến trong tự nhiên. Để tạo ra các điện cực như vậy, cần phải lắng các màng mỏng của vật liệu nano mới trên các tấm cacbon khá rẻ.
Các nhân viên của Phòng thí nghiệm tổng hợp laze của vật liệu nano đa chức năng tại Viện nghiên cứu hạt nhân quốc gia LaPlaz thuộc Đại học hạt nhân MEPhI (Laboratory for Laser Synthesis of Multifunctional Nanomaterials at the LaPlaz Institute of National Research Nuclear University MEPhI) đã phát triển công nghệ laze có thể được sử dụng để kiểm soát các điều kiện lắng đọng màng mỏng trên điện cực và thu được màng xúc tác với thành phần hóa học cần thiết và sự đóng gói tối ưu của các nguyên tử.
“Chúng tôi sử dụng ánh sáng laser để làm bay hơi và ion hóa các mục tiêu làm từ molypden disulfide. Bằng cách chọn cường độ chiếu xạ laser của mục tiêu và các điều kiện cho sự giãn nở của plasma laser tới điện cực, chúng tôi tạo ra các màng có các đặc tính cần thiết. Người đứng đầu phòng thí nghiệm, Giáo sư Vyacheslav Fominsky, cho biết các phương pháp thân thiện với môi trường của chúng tôi có thể thu được chất xúc tác không thua kém các mẫu tốt nhất thế giới thu được bằng cách sử dụng thuốc thử nguy hiểm.
Để lưu trữ và vận chuyển nhiên liệu thu được, các nhân viên của Phòng thí nghiệm Tương tác bề mặt và Công nghệ Plasma của Viện LaPlaz thuộc Đại học Hạt nhân Nghiên cứu Quốc gia MEPhI đã phát triển các ổ đĩa thể rắn đặc biệt.
“Ổ đĩa là một thùng chứa đầy bột kim loại mịn (theo thứ tự một micron). Nó được "sạc" bằng hydro bằng cách đốt nóng bột trong môi trường hydro và sau đó "thải ra" bằng cách đốt nóng, giải phóng hydro để sử dụng trong chu trình nhiên liệu. Một loại ổ đĩa thể rắn khác là ổ đĩa phim. , trong đó một lớp mỏng của kim loại hoạt động với hydro được lắng đọng trên một dải mỏng trong khí quyển hydro. Trong một chu kỳ, cả sự lắng đọng của kim loại và sự bão hòa của nó với hydro đều diễn ra ”, người đứng đầu phòng thí nghiệm, Giáo sư Alexander Pisarev cho biết.
Trong tương lai, nhân viên của MEPhI sẽ tiếp tục làm việc trong các lĩnh vực này.

 scientificrussia.ru
scientificrussia.ru
Comparative Study of the Structure, Composition, and Electrocatalytic Performance of Hydrogen Evolution in MoSx~2+δ/Mo and MoSx~3+δ Films Obtained by Pulsed Laser Deposition
Comparative Study of the Structure, Composition, and Electrocatalytic Performance of Hydrogen Evolution in MoSx~2+δ/Mo and MoSx~3+δ Films Obtained by Pulsed Laser Deposition
Systematic and in-depth studies of the structure, composition, and efficiency of hydrogen evolution reactions (HERs) in MoSx films, obtained by means of on- and off-axis pulsed laser deposition (PLD) from a MoS2 target, have been performed. The use of on-axis PLD (a standard configuration of...
Comparative Study of the Structure, Composition, and Electrocatalytic Performance of Hydrogen Evolution in MoSx~2+δ/Mo and MoSx~3+δ Films Obtained by Pulsed Laser Deposition
Systematic and in-depth studies of the structure, composition, and efficiency of hydrogen evolution reactions (HERs) in MoSx films, obtained by means of on- and off-axis pulsed laser deposition (PLD) from a MoS2 target, have been performed. The use of on-axis PLD (a standard configuration of...
Các nhà khoa học Nga đã phát triển một phương pháp mới để sản xuất hydro từ nước
Các chuyên gia từ Viện Công nghệ Laser và Plasma của Đại học Hạt nhân Nghiên cứu Quốc gia MEPhI (LaPlaz Institute of the National Research Nuclear University MEPhI) đã phát triển các chất xúc tác mới thân thiện với môi trường để sản xuất hydro từ nước, cũng như vật liệu để lưu trữ và vận chuyển. Theo các nhà nghiên cứu, điều này sẽ làm cho năng lượng hydro rẻ hơn, xanh hơn và an toàn hơn. Kết quả của nghiên cứu được công bố trên tạp chí nghiên cứu khoa học quốc tế Nanomaterials.
Comparative Study of the Structure, Composition, and Electrocatalytic Performance of Hydrogen Evolution in MoSx~2+δ/Mo and MoSx~3+δ Films Obtained by Pulsed Laser Deposition
Comparative Study of the Structure, Composition, and Electrocatalytic Performance of Hydrogen Evolution in MoSx~2+δ/Mo and MoSx~3+δ Films Obtained by Pulsed Laser Deposition
Systematic and in-depth studies of the structure, composition, and efficiency of hydrogen evolution reactions (HERs) in MoSx films, obtained by means of on- and off-axis pulsed laser deposition (PLD) from a MoS2 target, have been performed. The use of on-axis PLD (a standard configuration of...
Comparative Study of the Structure, Composition, and Electrocatalytic Performance of Hydrogen Evolution in MoSx~2+δ/Mo and MoSx~3+δ Films Obtained by Pulsed Laser Deposition
Systematic and in-depth studies of the structure, composition, and efficiency of hydrogen evolution reactions (HERs) in MoSx films, obtained by means of on- and off-axis pulsed laser deposition (PLD) from a MoS2 target, have been performed. The use of on-axis PLD (a standard configuration of...
Một trong những phương pháp đơn giản nhất để sản xuất hydro là điện phân - sự tách nước dưới tác động của dòng điện. Để thực hiện quá trình này một cách hiệu quả, cần phải có các điện cực mới, bao gồm các vật liệu rẻ tiền, các thành phần của chúng phải phổ biến trong tự nhiên. Để tạo ra các điện cực như vậy, cần phải lắng các màng mỏng của vật liệu nano mới trên các tấm cacbon khá rẻ.
Các nhân viên của Phòng thí nghiệm tổng hợp laze của vật liệu nano đa chức năng tại Viện nghiên cứu hạt nhân quốc gia LaPlaz thuộc Đại học hạt nhân MEPhI (Laboratory for Laser Synthesis of Multifunctional Nanomaterials at the LaPlaz Institute of National Research Nuclear University MEPhI) đã phát triển công nghệ laze có thể được sử dụng để kiểm soát các điều kiện lắng đọng màng mỏng trên điện cực và thu được màng xúc tác với thành phần hóa học cần thiết và sự đóng gói tối ưu của các nguyên tử.
“Chúng tôi sử dụng ánh sáng laser để làm bay hơi và ion hóa các mục tiêu làm từ molypden disulfide. Bằng cách chọn cường độ chiếu xạ laser của mục tiêu và các điều kiện cho sự giãn nở của plasma laser tới điện cực, chúng tôi tạo ra các màng có các đặc tính cần thiết. Người đứng đầu phòng thí nghiệm, Giáo sư Vyacheslav Fominsky, cho biết các phương pháp thân thiện với môi trường của chúng tôi có thể thu được chất xúc tác không thua kém các mẫu tốt nhất thế giới thu được bằng cách sử dụng thuốc thử nguy hiểm.
Để lưu trữ và vận chuyển nhiên liệu thu được, các nhân viên của Phòng thí nghiệm Tương tác bề mặt và Công nghệ Plasma của Viện LaPlaz thuộc Đại học Hạt nhân Nghiên cứu Quốc gia MEPhI đã phát triển các ổ đĩa thể rắn đặc biệt.
“Ổ đĩa là một thùng chứa đầy bột kim loại mịn (theo thứ tự một micron). Nó được "sạc" bằng hydro bằng cách đốt nóng bột trong môi trường hydro và sau đó "thải ra" bằng cách đốt nóng, giải phóng hydro để sử dụng trong chu trình nhiên liệu. Một loại ổ đĩa thể rắn khác là ổ đĩa phim. , trong đó một lớp mỏng của kim loại hoạt động với hydro được lắng đọng trên một dải mỏng trong khí quyển hydro. Trong một chu kỳ, cả sự lắng đọng của kim loại và sự bão hòa của nó với hydro đều diễn ra ”, người đứng đầu phòng thí nghiệm, Giáo sư Alexander Pisarev cho biết.
Trong tương lai, nhân viên của MEPhI sẽ tiếp tục làm việc trong các lĩnh vực này.
Российские ученые разработали новый способ получения водорода из воды
Он поможет сделать водородную энергетику дешевле, экологичнее и безопаснее
- Biển số
- OF-626585
- Ngày cấp bằng
- 24/3/19
- Số km
- 8,426
- Động cơ
- 310,264 Mã lực
Tiếp đoạn trích trênCông ty Parus Electro đã bắt đầu sản xuất các trạm sạc nhỏ gọn (compact charging stations ) cho xe điện WallBox
View attachment 6770852
Trạm sạc nhỏ gọn WallBox
Vào tháng 12 năm 2021, Parus Electro, một nhà phát triển và sản xuất thiết bị chuyển đổi điện của Nga, đã khởi động sản xuất hàng loạt trạm sạc điện xoay chiều WallBox (EZS).
Dòng WallBox là một bổ sung mới cho phạm vi các trạm sạc. Nó là một giải pháp một cửa cho khu vực tư nhân và thương mại. Giá treo tường cho phép bạn đặt thiết bị trong bất kỳ phòng hoặc bãi đậu xe nào. Xe điện được sạc bằng dòng điện xoay chiều với công suất đầu ra lên đến 22 kW với sự hỗ trợ của các đầu nối Loại 1 và Loại 2.
Những ưu điểm chính của dòng WallBox EZS:
"Parus Electro" có kinh nghiệm thành công trong việc cung cấp các sửa đổi khác nhau của các trạm phát điện, bao gồm cả những điều chỉnh cho một dự án cá nhân với công suất lên đến 350 kW, cho khách hàng tư nhân và nhà nước.
- lắp đặt tường nhỏ gọn
- điều khiển từ thiết bị di động hoặc PC
- hệ thống bảo vệ tiên tiến để vận hành an toàn
- Hỗ trợ giao thức trao đổi dữ liệu OCPP để tích hợp vào hệ thống thành phố thông minh
- sản phẩm chất lượng cao từ nhà sản xuất hàng đầu của Nga
Xu hướng toàn cầu hướng tới phát triển các công nghệ thân thiện với môi trường được LHQ hình thành vào năm 2015, khi các mục tiêu phát triển bền vững toàn cầu và khái niệm ESG (Môi trường, Xã hội, Quản trị) được thông qua. Một trong những chỉ số quan trọng nhất của việc thực hiện chiến lược là sự chuyển đổi rộng rãi sang phương tiện giao thông thân thiện với môi trường. Công ty Parus Electro, với tư cách là nhà sản xuất EZS, hoàn toàn ủng hộ khái niệm ESG và tuân thủ các nguyên tắc ứng xử kinh doanh có trách nhiệm.
Đặc điểm kỹ thuật chi tiết của các trạm sạc và thông tin bổ sung có thể được tìm thấy trên trang web của công ty
WallBox – новая серия электрозарядных станций (ЭЗС) переменным током.
Мировой тренд на развитие экологичных технологий был сформирован ООН в 2015гparus-electro.ru
Парус электро
Источники бесперебойного питания, ИБП, UPS от российского производителя со склада в Москве. Наличие, гарантия, монтажные и пуско-наладочные работы.
Parus Electro và Green Drive khởi động dự án mạng lưới các trạm sạc xe điện
Bắt đầu từ tháng 9 năm 2021, Parus Electro, nhà phát triển và sản xuất trạm sạc điện (ECS) của Nga, đã cung cấp thiết bị để thực hiện dự án quy mô lớn của Green Drive nhằm tạo ra cơ sở hạ tầng cho giao thông điện.
Vào năm 2022, 20 trạm sạc nhanh do Nga sản xuất sẽ được lắp đặt trên đường cao tốc M4 giữa Moscow và Sochi, cho phép sạc một chiếc ô tô điện trong vòng chưa đầy 30 phút. Việc phát triển mạng lưới các trạm sạc sẽ giúp bạn có thể di chuyển trên một chiếc xe điện hiện đại dọc theo lộ trình dài hơn 1.500 km.
Tùy thuộc vào mô hình được lắp đặt, các trạm sẽ cho phép sạc đồng thời tối đa 3 xe điện (2 trong số đó bằng cách sạc nhanh) với tổng công suất lên đến 200 kW. Đồng thời, hỗ trợ cho tất cả các tiêu chuẩn phí chính được cung cấp - CHAdeMO, CCS Combo 2, Loại 2.
Điều quan trọng cần lưu ý là việc sử dụng công nghệ cân bằng động trong các trạm điện Parus. Nó cho phép bạn phân phối hiệu quả công suất đầu ra tùy thuộc vào mức sạc pin hiện tại của xe điện và số lượng người dùng đồng thời sạc.
Vào năm 2021, trong khuôn khổ hợp tác với Green Drive, EZS do Parus Electro sản xuất đã được lắp đặt và vận hành thành công tại Moscow, Vùng Rostov và Lãnh thổ Krasnodar. Hầu hết tất cả các loại xe điện hiện có ở Nga đều được sạc trên chúng, từ xe điện cỡ nhỏ Lada Ellada và Mitsubishi I-MiEV đến Porsche Taycan hiện đại mạnh mẽ và tất cả các loại xe Tesla. Với kinh nghiệm tích lũy được, dự án quy mô lớn đang thực hiện sẽ mở ra một tuyến đường hoàn chỉnh mới để đi khắp lãnh thổ Nga cho các chủ sở hữu xe điện và sẽ đưa xe điện trở thành một phân khúc giao thông thậm chí còn khổng lồ hơn ở nước này.
Trạm sạc nhanh cho xe điện
Парус электро
Источники бесперебойного питания, ИБП, UPS от российского производителя со склада в Москве. Наличие, гарантия, монтажные и пуско-наладочные работы.
- Biển số
- OF-626585
- Ngày cấp bằng
- 24/3/19
- Số km
- 8,426
- Động cơ
- 310,264 Mã lực
Quay lại nhà luyện thép uy tin Severstal uy tín của Nga, đã được nói không ít lần từ những vol trước, đã từng bán sản phẩm sang Mỹ, EU, châu Á, và đây là lần đầu họ bán sang Canada.
Lần đầu tiên Severstal cung cấp ống đường kính lớn (LDP - large-diameter pipes) cho Canada

Lần đầu tiên Severstal vận chuyển 1.500 tấn ống đường kính lớn (LDP) đến Canada.
Các LDP sẽ được giao cho một trong những nhà sản xuất và phân phối đường ống hàng đầu ở Bắc Mỹ và được sử dụng bởi ngành công nghiệp năng lượng ở Canada.
Lần đầu tiên, ống đường kính lớn được sản xuất theo tiêu chuẩn kép - CSA Z245.1 của Canada và API 5L của Mỹ. Các ống này cũng đáp ứng các thông số kỹ thuật của NACE MR 0103 và NACE MR 0175 và được sản xuất theo yêu cầu của thị trường Canada truyền thống.
LDP có đường kính từ 508 đến 1066,8 mm với độ dày thành từ 12,7 đến 19,05 mm được làm bằng thép X42M / GR 290-II + Gr B và X70M / GR 483-II + GR 448-II tại Nhà máy ống Izhora (ITZ , một phần của bộ phận Thép Nga Severstal của PJSC Severstal), đặt tại một địa điểm sản xuất ở quận Kolpinsky của St.Petersburg. Để sản xuất ống, Severstal sử dụng kim loại cán của riêng mình, được sản xuất bởi nhà máy 5000 của nhà máy cán tấm của công ty, nằm trên cùng khu công nghiệp với ITZ. Các đường ống được phủ một lớp sơn epoxy bảo vệ, giúp chúng không bị ăn mòn trong quá trình vận chuyển.

“Năm ngoái, Severstal đã mở rộng đáng kể địa lý của ống đường kính lớn xuất khẩu, trở thành một công ty tham gia đầy đủ và cạnh tranh trên thị trường toàn cầu. Đây là kết quả của quá trình làm việc có hệ thống của toàn đội nhằm phát triển thị trường mới và các loại sản phẩm mới, các dịch vụ bổ sung cho khách hàng xuất khẩu ”, Alexander Semyonov, Giám đốc kinh doanh của các công ty năng lượng tại Severstal cho biết.
Khi chọn Severstal làm nhà cung cấp, khách hàng đã lưu ý đến uy tín lâu năm của công ty với tư cách là công ty đi đầu trong lĩnh vực sản xuất luyện kim của Nga và bày tỏ hoàn toàn tin tưởng vào việc có được những sản phẩm chất lượng cao nhất. Ngoài ra, khách hàng cho biết ý định phát triển hơn nữa hợp tác quốc tế giữa các công ty dựa trên việc tuân thủ chất lượng của Nga với các yêu cầu cao nhất của Canada.

 www.severstal.com
www.severstal.com
Lần đầu tiên Severstal cung cấp ống đường kính lớn (LDP - large-diameter pipes) cho Canada
Lần đầu tiên Severstal vận chuyển 1.500 tấn ống đường kính lớn (LDP) đến Canada.
Các LDP sẽ được giao cho một trong những nhà sản xuất và phân phối đường ống hàng đầu ở Bắc Mỹ và được sử dụng bởi ngành công nghiệp năng lượng ở Canada.
Lần đầu tiên, ống đường kính lớn được sản xuất theo tiêu chuẩn kép - CSA Z245.1 của Canada và API 5L của Mỹ. Các ống này cũng đáp ứng các thông số kỹ thuật của NACE MR 0103 và NACE MR 0175 và được sản xuất theo yêu cầu của thị trường Canada truyền thống.
LDP có đường kính từ 508 đến 1066,8 mm với độ dày thành từ 12,7 đến 19,05 mm được làm bằng thép X42M / GR 290-II + Gr B và X70M / GR 483-II + GR 448-II tại Nhà máy ống Izhora (ITZ , một phần của bộ phận Thép Nga Severstal của PJSC Severstal), đặt tại một địa điểm sản xuất ở quận Kolpinsky của St.Petersburg. Để sản xuất ống, Severstal sử dụng kim loại cán của riêng mình, được sản xuất bởi nhà máy 5000 của nhà máy cán tấm của công ty, nằm trên cùng khu công nghiệp với ITZ. Các đường ống được phủ một lớp sơn epoxy bảo vệ, giúp chúng không bị ăn mòn trong quá trình vận chuyển.
“Năm ngoái, Severstal đã mở rộng đáng kể địa lý của ống đường kính lớn xuất khẩu, trở thành một công ty tham gia đầy đủ và cạnh tranh trên thị trường toàn cầu. Đây là kết quả của quá trình làm việc có hệ thống của toàn đội nhằm phát triển thị trường mới và các loại sản phẩm mới, các dịch vụ bổ sung cho khách hàng xuất khẩu ”, Alexander Semyonov, Giám đốc kinh doanh của các công ty năng lượng tại Severstal cho biết.
Khi chọn Severstal làm nhà cung cấp, khách hàng đã lưu ý đến uy tín lâu năm của công ty với tư cách là công ty đi đầu trong lĩnh vực sản xuất luyện kim của Nga và bày tỏ hoàn toàn tin tưởng vào việc có được những sản phẩm chất lượng cao nhất. Ngoài ra, khách hàng cho biết ý định phát triển hơn nữa hợp tác quốc tế giữa các công ty dựa trên việc tuân thủ chất lượng của Nga với các yêu cầu cao nhất của Canada.
Северсталь - «Северсталь» впервые поставила трубы большого диаметра в Канаду
«Северсталь» впервые отправила 1 500 тонн труб большого диаметра (ТБД) в Канаду.
- Biển số
- OF-799752
- Ngày cấp bằng
- 8/12/21
- Số km
- 24
- Động cơ
- 15,040 Mã lực
- Tuổi
- 44
Mình không chê chuyện nhà nước Nga đầu tư, hỗ trợ một ngành công nghiệp nào đó phát triển thành mũi nhọn. Mình viết để bình luận về cái đầu đề bài báo giật gân là nước Nga không chỉ có dầu khí, mà còn có cả công nghiệp hạt nhân này kia nữa.1) Năng lượng hạt nhân không hoặc chưa phải thị trường tự do cạnh tranh. Các nước phương Tây cũng nhận trợ cấp từ nhà nước.
2) Kể cả ngành vũ trụ hiện nay ở phương tây cũng có sự hỗ trợ từ nhà nước, nhưng dưới hình thức khác. Thậm chí kể cả nhiều ngành công nghệ cao khác của Mỹ cũng có sự hỗ trợ, có thời điểm gần như bao cấp hoàn toàn, nhưng dưới những hình thức che đậy. Cái này đã được nói đến không chỉ bởi tôi, trong vol này, và cả những vol trước nữa. Riêng ở EU thì chẳng phải chỉ ngành công nghệ, công nghiệp, mà nhiều ngành dân sự khác cũng có hỗ trợ từ nhà nước, không thì chết sặc tiết, và EU bảo hộ thị trường cao lắm.
Nếu tuyên truyền tự do cạnh tranh thì Mỹ hay phương tây nói chung đừng dùng các thủ thuật trừng phạt, chính trị, đe doạ, ngoại giao này nọ làm đòn bẩy kinh tế nữa nhé, và kể cả việc đưa ra luật chơi trong công nghệ cũng nên bình đẳng, đừng tự mình cầm trịch như thế
3) Những ngành chiến lược như năng lượng chưa thể nào tự do cạnh tranh được, hoặc có cố làm ra vẻ bề ngoài là tự do cạnh tranh, thì vẫn có chính trị trong đó, nhất là năng lượng trong đối ngoại. Còn năng lượng trong đối nội, thì cũng chỉ tự do ở 1 mức giới hạn nào đó. Cái này đã kể ví dụ hồi ở Mỹ từ vol 1, và ngay cả ở nước tôi đang sống hiện nay, cạnh tranh trong những lĩnh vực tính dãn nở thấp, chi phí đầu tư lớn vào cơ sở hạ tầng, thu hồi vốn chậm kiểu này, thì cũng chỉ đến 1 mức giới hạn mà thôi
4) Những gì tuyên truyền ầm ĩ trên media luôn khác bản chất thực
Ngành công nghiệp hạt nhân của Nga đang đứng trên đôi chân của ngành dầu khí Nga. Thậm chí nói rộng ra toàn bộ nền kinh tế Nga đang đứng trên đôi chân của ngành dầu khí Nga. Tính từ năm 1999 đến nay 2021, tăng trưởng GDP của nước Nga bám theo tăng giảm của giá dầu. Con số năm 2020 tỉ trọng thu từ đdầu trong ngân sách Nga giảm nó phản ánh thay đổi của giá xuất khẩu dầu chứ không phản ánh thay đổi cơ cấu kinh tế của nước Nga, không tin google thu dầu khí của Nga năm 2014 thì sẽ rõ.
Biểu đồ tương quan tăng trưởng GDP Nga với thay đổi của giá dầu thế giới
- Biển số
- OF-626585
- Ngày cấp bằng
- 24/3/19
- Số km
- 8,426
- Động cơ
- 310,264 Mã lực
Lúc thì bác nói cái này, lúc thì nói cái khác. Lúc thì kêu tự do cạnh tranh, rồi lại kêu k phản đối nhà nước đầu tư, bây giờ lại nói về kinh tế Nga. Câu chuyện về số đo GDP hay các số đo khác, cơ cấu kinh tế Nga, dầu khí nữa, rồi đủ thứ nữa, ưu và nhược điểm của Nga nói chung, của kinh tế Nga nói riêng cũng đã nói phát chán ra rồi, đã được bàn từ vol 1, vol 2, etc. qua nhiều vol rồi. Bác thì cũng chỉ lại nói lại cái mà đã được nói, còn tôi thì thực sự không muốn nhắc lại, cũng chả hơi đâu mà tìm lại. Để cho bác nào thích thì tiếp chuyện bác vậyMình không chê chuyện nhà nước Nga đầu tư, hỗ trợ một ngành công nghiệp nào đó phát triển thành mũi nhọn. Mình viết để bình luận về cái đầu đề bài báo giật gân là nước Nga không chỉ có dầu khí, mà còn có cả công nghiệp hạt nhân này kia nữa.
Ngành công nghiệp hạt nhân của Nga đang đứng trên đôi chân của ngành dầu khí Nga. Thậm chí nói rộng ra toàn bộ nền kinh tế Nga đang đứng trên đôi chân của ngành dầu khí Nga. Tính từ năm 1999 đến nay 2021, tăng trưởng GDP của nước Nga bám theo tăng giảm của giá dầu. Con số năm 2020 tỉ trọng thu từ đdầu trong ngân sách Nga giảm nó phản ánh thay đổi của giá xuất khẩu dầu chứ không phản ánh thay đổi cơ cấu kinh tế của nước Nga, không tin google thu dầu khí của Nga năm 2014 thì sẽ rõ.
Biểu đồ tương quan tăng trưởng GDP Nga với thay đổi của giá dầu thế giới
View attachment 6839028
- Biển số
- OF-626585
- Ngày cấp bằng
- 24/3/19
- Số km
- 8,426
- Động cơ
- 310,264 Mã lực
Nhà máy điện hạt nhân ở Trung Quốc
Tại tổ máy số 3 của NPP Xudapu, phần thân của thiết bị khoanh vùng lõi chảy đã được lắp đặt

Tại tổ máy số 3 của NPP Xudapu, đang được xây dựng ở Trung Quốc theo dự án VVER-1200 của Nga, phần thân của thiết bị khoanh vùng lõi chảy - "bẫy" - nặng 156 tấn và cao 6,1 m, đã được lắp đặt. ở vị trí thường xuyên của nó.
Thiết bị cục bộ hóa nóng chảy lõi là một trong những hệ thống an toàn thụ động cung cấp khả năng cách ly tấm nền xây dựng lò phản ứng khỏi lõi nóng chảy trong trường hợp xảy ra tai nạn nghiêm trọng. Hoạt động này là một trong những hoạt động của lộ trình quan trọng, sau đó việc xây dựng thêm trục lò phản ứng có thể được thực hiện.
Để tham khảo:
NPP Xudapu là dự án hợp tác mới giữa Nga và Trung Quốc trong lĩnh vực năng lượng hạt nhân, tọa lạc tại thành phố Hồ Lô Đảo (tỉnh Liêu Ninh). Trong năm 2019, một số hợp đồng đã được ký kết, bao gồm hợp đồng chung xây dựng tổ máy điện số 3 và số 4 của NPP Xudapu với các lò phản ứng VVER-1200, cũng như hợp đồng cung cấp nhiên liệu hạt nhân.
Theo hợp đồng, phía Nga sẽ thiết kế "đảo hạt nhân" của nhà ga, cung cấp các thiết bị chủ chốt của đảo hạt nhân cho cả hai tổ máy, cung cấp dịch vụ giám sát thiết kế, giám sát lắp đặt, giám sát vận hành các thiết bị được cung cấp. . Dự kiến vận hành các tổ máy vào năm 2027-2028.
 www.rosatom.ru
www.rosatom.ru
Tại tổ máy số 3 của NPP Xudapu, phần thân của thiết bị khoanh vùng lõi chảy đã được lắp đặt
Tại tổ máy số 3 của NPP Xudapu, đang được xây dựng ở Trung Quốc theo dự án VVER-1200 của Nga, phần thân của thiết bị khoanh vùng lõi chảy - "bẫy" - nặng 156 tấn và cao 6,1 m, đã được lắp đặt. ở vị trí thường xuyên của nó.
Thiết bị cục bộ hóa nóng chảy lõi là một trong những hệ thống an toàn thụ động cung cấp khả năng cách ly tấm nền xây dựng lò phản ứng khỏi lõi nóng chảy trong trường hợp xảy ra tai nạn nghiêm trọng. Hoạt động này là một trong những hoạt động của lộ trình quan trọng, sau đó việc xây dựng thêm trục lò phản ứng có thể được thực hiện.
Để tham khảo:
NPP Xudapu là dự án hợp tác mới giữa Nga và Trung Quốc trong lĩnh vực năng lượng hạt nhân, tọa lạc tại thành phố Hồ Lô Đảo (tỉnh Liêu Ninh). Trong năm 2019, một số hợp đồng đã được ký kết, bao gồm hợp đồng chung xây dựng tổ máy điện số 3 và số 4 của NPP Xudapu với các lò phản ứng VVER-1200, cũng như hợp đồng cung cấp nhiên liệu hạt nhân.
Theo hợp đồng, phía Nga sẽ thiết kế "đảo hạt nhân" của nhà ga, cung cấp các thiết bị chủ chốt của đảo hạt nhân cho cả hai tổ máy, cung cấp dịch vụ giám sát thiết kế, giám sát lắp đặt, giám sát vận hành các thiết bị được cung cấp. . Dự kiến vận hành các tổ máy vào năm 2027-2028.
Росатом Госкорпорация «Росатом» ядерные технологии атомная энергетика АЭС ядерная медицина
Росатом Госкорпорация «Росатом» ядерные технологии атомная энергетика АЭС ядерная медицина ядерное машиностроение ядерное топливо атомный ледокол добыча урана ветроэнергетика цифровизация
www.rosatom.ru
- Biển số
- OF-626585
- Ngày cấp bằng
- 24/3/19
- Số km
- 8,426
- Động cơ
- 310,264 Mã lực
Rone95 rugi_vnb anhdung1 Ngo Rung ktqsminh Bachsima Bastion P quangsot Vodka_Putinka Putinka_Vodka
A98 A97 Hà Tam Kasparov Bigmoto elevonic tieulyphidao Hải Hoà Bigcat1
Vulcan V70 Aliabu aliabu2
Hình như con động cơ AL-55I này Nga làm chỉ để phục vụ cho máy bay huấn luyện của Ấn phải k các bác, còn máy bay huấn luyện của Nga Yak-130 có xài con động cơ này đâu (trước dùng AI-222 do Nga và Ukraine hợp tác làm, bây giờ xài AI-222-25 do Nga làm 100%). Cũng chưa thấy AL-55I dùng cho con gì khác của Nga cả. Không khéo sau này Nga ngố lắp động cơ này lên một UCAV nào đó trong tương lai cũng nên
Ấn cũng xài cả ghế phóng Zvezda K36CT của Nga
Máy bay huấn luyện Ấn Độ HJT-36 với động cơ AL-55I của Nga đã hoàn thành xuất sắc các bài kiểm tra quan trọng

HJT-36 "Sitara" là máy bay huấn luyện của Ấn Độ thuộc giai đoạn 2 của chương trình huấn luyện phi công chiến đấu, đang được phát triển bởi Hindustan Aeronautics Limited (HAL) để thay thế máy bay huấn luyện HJT-16 Kiran đã lỗi thời.
Máy bay được trang bị động cơ phản lực AL-55I của Nga do Hiệp hội Sản xuất Công trình Động cơ Ufa (UMPO) phát triển. Động cơ này được tạo ra bằng cách thay đổi quy mô động cơ AL-31 được lắp đặt trên máy bay chiến đấu và máy bay chiến đấu đa năng Su-27/30/34 của Nga.
Khi lựa chọn động cơ cho HJT-36, AL-55I của Nga đã vượt qua đối thủ Pháp Snecma Larzac 04-30, được sử dụng trong huấn luyện chiến đấu Dassault / Dornier Alpha Jet, do mạnh hơn, dễ bảo trì và đồng thời thấp hơn Giá cả.
Ngoài ra, ghế phóng Zvezda K36CT của Nga đã được lắp đặt trên máy bay thử nghiệm.
Trong năm 2009-2015 , HJT-36 đã thực hiện hơn 800 chuyến bay thử nghiệm. HAL đã nhận được đơn đặt hàng trước vài chục chiếc từ Không quân Ấn Độ. Nhưng ở giai đoạn cuối cùng của kiểm tra chứng nhận, máy bay đã thất bại trong các bài kiểm tra độ xoáy quan trọng.
Sau đó, một cuộc thiết kế lại đáng kể phần đuôi của máy bay đã được thực hiện, và nó được trang bị thêm một chiếc dù chống xoáy. Vào cuối năm 2020, máy bay tiếp tục thử nghiệm. Cũng trong tháng 2 năm 2021, máy bay đã nhận được động cơ AL-55I với nguồn tài nguyên gia tăng được xác nhận bằng các thử nghiệm trên mặt đất kéo dài 1200 giờ (tài nguyên ước tính - lên đến 6400 giờ ở phần lạnh và 4000 giờ ở phần nóng).
Cuối cùng, vào đầu năm 2021, chiếc máy bay được cập nhật đã hoàn thành thành công các bài kiểm tra, thể hiện sự phục hồi từ một vòng quay sau sáu vòng quay sang hai bên phải và trái. HAL hy vọng sẽ sớm sử dụng HJT-36 của Không quân Ấn Độ.
HJT-36 là máy bay sản xuất đầu tiên sử dụng động cơ AL-55. Trước đó vào năm 2008, AL-55 đã vượt qua thành công các cuộc thử nghiệm trên một máy bay huấn luyện MiG-AT chưa đi vào sản xuất. Động cơ AL-55 trong các phiên bản khác nhau có thể được sử dụng trên máy bay huấn luyện và chiến đấu siêu âm và (trong phiên bản có bộ đốt sau) và máy bay không người lái.

 indiaaheadnews.com
indiaaheadnews.com
A98 A97 Hà Tam Kasparov Bigmoto elevonic tieulyphidao Hải Hoà Bigcat1
Vulcan V70 Aliabu aliabu2
Hình như con động cơ AL-55I này Nga làm chỉ để phục vụ cho máy bay huấn luyện của Ấn phải k các bác, còn máy bay huấn luyện của Nga Yak-130 có xài con động cơ này đâu (trước dùng AI-222 do Nga và Ukraine hợp tác làm, bây giờ xài AI-222-25 do Nga làm 100%). Cũng chưa thấy AL-55I dùng cho con gì khác của Nga cả. Không khéo sau này Nga ngố lắp động cơ này lên một UCAV nào đó trong tương lai cũng nên
Ấn cũng xài cả ghế phóng Zvezda K36CT của Nga
Máy bay huấn luyện Ấn Độ HJT-36 với động cơ AL-55I của Nga đã hoàn thành xuất sắc các bài kiểm tra quan trọng
HJT-36 "Sitara" là máy bay huấn luyện của Ấn Độ thuộc giai đoạn 2 của chương trình huấn luyện phi công chiến đấu, đang được phát triển bởi Hindustan Aeronautics Limited (HAL) để thay thế máy bay huấn luyện HJT-16 Kiran đã lỗi thời.
Máy bay được trang bị động cơ phản lực AL-55I của Nga do Hiệp hội Sản xuất Công trình Động cơ Ufa (UMPO) phát triển. Động cơ này được tạo ra bằng cách thay đổi quy mô động cơ AL-31 được lắp đặt trên máy bay chiến đấu và máy bay chiến đấu đa năng Su-27/30/34 của Nga.
Khi lựa chọn động cơ cho HJT-36, AL-55I của Nga đã vượt qua đối thủ Pháp Snecma Larzac 04-30, được sử dụng trong huấn luyện chiến đấu Dassault / Dornier Alpha Jet, do mạnh hơn, dễ bảo trì và đồng thời thấp hơn Giá cả.
Ngoài ra, ghế phóng Zvezda K36CT của Nga đã được lắp đặt trên máy bay thử nghiệm.
Trong năm 2009-2015 , HJT-36 đã thực hiện hơn 800 chuyến bay thử nghiệm. HAL đã nhận được đơn đặt hàng trước vài chục chiếc từ Không quân Ấn Độ. Nhưng ở giai đoạn cuối cùng của kiểm tra chứng nhận, máy bay đã thất bại trong các bài kiểm tra độ xoáy quan trọng.
Sau đó, một cuộc thiết kế lại đáng kể phần đuôi của máy bay đã được thực hiện, và nó được trang bị thêm một chiếc dù chống xoáy. Vào cuối năm 2020, máy bay tiếp tục thử nghiệm. Cũng trong tháng 2 năm 2021, máy bay đã nhận được động cơ AL-55I với nguồn tài nguyên gia tăng được xác nhận bằng các thử nghiệm trên mặt đất kéo dài 1200 giờ (tài nguyên ước tính - lên đến 6400 giờ ở phần lạnh và 4000 giờ ở phần nóng).
Cuối cùng, vào đầu năm 2021, chiếc máy bay được cập nhật đã hoàn thành thành công các bài kiểm tra, thể hiện sự phục hồi từ một vòng quay sau sáu vòng quay sang hai bên phải và trái. HAL hy vọng sẽ sớm sử dụng HJT-36 của Không quân Ấn Độ.
HJT-36 là máy bay sản xuất đầu tiên sử dụng động cơ AL-55. Trước đó vào năm 2008, AL-55 đã vượt qua thành công các cuộc thử nghiệm trên một máy bay huấn luyện MiG-AT chưa đi vào sản xuất. Động cơ AL-55 trong các phiên bản khác nhau có thể được sử dụng trên máy bay huấn luyện và chiến đấu siêu âm và (trong phiên bản có bộ đốt sau) và máy bay không người lái.
India’s Indeginous Intermediate Jet Trainer Completes 6-Turn Spins, HAL Hopeful Of Meeting IAF’s Requirement - India Ahead
The IJT which was conceived by HAL as a replacement to the ageing Kirans of IAF fleet, had completed demonstration of its capabilities in terms of altitude and speed envelope, load factor, satisfactory stall characteristics and limited armament capability as required by IAF. New Delhi: Hindustan...
indiaaheadnews.com
Chỉnh sửa cuối:
- Biển số
- OF-626585
- Ngày cấp bằng
- 24/3/19
- Số km
- 8,426
- Động cơ
- 310,264 Mã lực
Phản ứng của Ukraine sau khi bị Đức phủ quyết bán vũ khí sát thương
Đại sứ Ukraine tại Berlin chỉ trích người Đức đã bỏ qua "sự vĩ đại của người Ukraine"

Đại sứ Ukraine tại Đức Andriy Melnyk đưa ra một chỉ trích khác đối với Berlin. Theo ý kiến của ông, các nhà chức trách Đức từ chối công nhận "sự vĩ đại của đất nước Ukraine", và do đó thường phớt lờ những lợi ích hợp pháp của Kiev.
Nhà ngoại giao lưu ý rằng ngày nay những kiệt tác của các nhà soạn nhạc Ukraina không vang lên trong các nhà hát opera và giai điệu của Đức, và học sinh Đức không biết các nhà văn Ukraina. Theo Melnik, tình trạng này phải được thay đổi.
Cho đến khi những kiệt tác của các nhà soạn nhạc Ukraina trở thành một phần không thể thiếu trong các tiết mục của các nhà hát opera và hiệp hội nghệ sĩ ở Đức và thế giới, cho đến khi học sinh Đức học các nhà văn và nhà thơ của chúng ta, tất cả các yêu cầu chính trị chính trị của chúng ta sẽ phải chịu cùng một phản ứng bị kiềm chế, như vậy , thật không may, thường là trường hợp.
đại sứ nói.
Melnyk lưu ý với sự tiếc nuối rằng toàn bộ lịch sử của Ukraine, tất cả "di sản quốc gia" của nó chỉ được nhìn qua lăng kính của Nga.
Đại sứ Ukraine cũng than thở rằng những tuyên bố của ông về quan chức Berlin thường bị cho là cực kỳ tiêu cực, và ông đã nhiều lần nghe lời khuyên kiên quyết của chính quyền địa phương để tiết chế các thành phần truyền thông trong chính sách ngoại giao Ukraine.
The Ukrainian ambassador in Berlin criticized the Germans for ignoring the "greatness of the Ukrainians"
Украинский посол в Берлине раскритиковал немцев за игнорирование «величия украинцев»

 topcor.ru
topcor.ru
------------------------------------------------------------------------------
Tất cả các ngân hàng từ chối: Moldova không có khả năng thanh toán cho khí đốt của Nga
Moldova một lần nữa đứng bên bờ vực của cuộc khủng hoảng khí đốt. Các ngân hàng địa phương từ chối cấp một khoản vay cho Công ty năng lượng Moldova-Nga, Công ty cổ phần Moldovagaz (Moldovagaz SA) để thanh toán các khoản thanh toán cho nguyên liệu thô. Điều này đã được công bố vào ngày 18 tháng 1 trong một cuộc phỏng vấn với tờ báo Ziarul de Gardă của Moldova bởi Vadim Cheban, người đứng đầu công ty.
Ông nói rõ rằng ông đã nộp đơn cho bốn ngân hàng về vấn đề này, nhưng đề nghị của Công ty cổ phần Moldovagaz (50% cổ phần thuộc về Gazprom PJSC, ACS thuộc Bộ Kinh tế Cộng hòa Moldova - 35,33%, SCUI của Cộng hòa Moldavian Pridnestrovian - 13,44%) đã không khơi dậy được sự quan tâm của các tổ chức tài chính này. Theo hợp đồng, trong vòng hai ngày, Công ty cổ phần "Moldovagaz" phải chuyển tiền cho PJSC "Gazprom", nếu không, việc cung cấp "nhiên liệu xanh" sẽ ngừng lại.
Công ty đã tiến hành thanh toán trước ngày 20 hàng tháng cho lượng khí đã nhận trong tháng trước và cung cấp khoản thanh toán trước 50% cho lần tiếp theo, tức là hiện tại. Hơn nữa, công ty đã thanh toán cho lượng khí tiêu thụ vào tháng 12 năm 2021.
Trong số 63 triệu USD, chúng tôi đã trả hết 23 triệu USD, đến thứ Năm (20/1), chúng tôi sẽ trả thêm 15 triệu USD nữa và tôi nghĩ chúng tôi sẽ còn nợ 25 triệu USD.
Anh ấy đã giải thích.
Cheban tỏ ra bi quan về khả năng thanh toán kịp thời tất cả các khoản tiền đến hạn. Ông nói thêm rằng vấn đề này hiện đang được thảo luận ở cấp chính phủ Moldova và các cuộc đàm phán đang được tiến hành với phía Nga. Các chức năng đảm bảo rằng mọi thứ có thể đang được thực hiện để tránh những phát triển tiêu cực.
Người đứng đầu công ty nhấn mạnh rằng ông đã nộp đơn lên PJSC Gazprom với yêu cầu hoãn thanh toán số tiền 25 triệu USD đã đề cập trong vài ngày hoặc cung cấp một khoản vay ngắn hạn cho số tiền này.
Chúng tôi sẽ thanh toán mỗi ngày. Chúng tôi sẽ trả tiền, nhưng muộn hơn một chút. Hơn nữa, chúng tôi đang chờ đợi những điều chỉnh về biểu giá khí đốt
Cheban đã tổng kết lại.
Chúng tôi xin nhắc lại rằng trước đó Công ty Cổ phần "Moldovagaz" đã đề nghị các nhà máy nhiệt điện trong nước, những người tiêu thụ nguyên liệu năng lượng chính, vay vốn từ các tổ chức tài chính quốc tế để trả cho việc tiêu thụ khí hiện tại cho công ty. Hiện Công ty cổ phần "Moldovagaz" đã gửi một gói thầu lên chính phủ với đề xuất thực hiện các biện pháp chống khủng hoảng trong ngành. Trong số các biện pháp đó là việc trả lại thuế VAT của công ty từ nhà nước, ngay lập tức sẽ tìm thấy 22 triệu đô la để giải quyết các tài khoản với người Nga. Có những đề xuất khác trong danh sách, từ bồi thường ngân sách cho người tiêu dùng và kết thúc bằng chính sách thuế quan .
Đồng thời, người đứng đầu chính phủ Moldova, Natalia Gavrilitsa, đã thông báo rằng không có tiền trong ngân sách và Nội các Bộ trưởng một lần nữa có thể yêu cầu quốc hội nước này ban bố tình trạng khẩn cấp trong lĩnh vực năng lượng nếu Phía Nga không nhượng bộ Chisinau. Ngoài ra, Moldova muốn “gia hạn” hợp đồng đã ký vào tháng 10 năm 2021 với PJSC Gazprom sau khi mùa giải nóng bỏng này kết thúc.
All banks refused: Moldova is not able to pay for Russian gas
Все банки отказали: Молдавия не в состоянии оплачивать российский газ
 topcor.ru
topcor.ru
------------------------------------------------------------------------
Một góc nhìn từ phía Nga
Nhà phân tích Frolov: Thảm họa kinh tế buộc Moldova phải xin Gazprom trì hoãn
Moldova đã tìm đến Nga để cầu cứu vì không có khả năng trả khoản nợ nhiên liệu. Nhà phân tích Alexander Frolov nêu ra hai lý do dẫn đến lỗ ngân sách ở Chisinau.
Phó Thủ tướng Chính phủ Moldova Andrei Spinu đã chuyển sang người đứng đầu Gazprom, Alexei Miller, để người đứng đầu Gazprom giúp nước cộng hòa giải quyết các nghĩa vụ nợ của đất nước. Theo chính trị gia, Moldovagaz thiếu 25-30 triệu đô la trước khi thanh toán toàn bộ chi phí tạm ứng.
“Gazprom là cổ đông chính của Moldovagaz. Câu hỏi đặt ra là, cổ đông lớn làm gì để đảm bảo rằng công ty cung cấp khí đốt cho người tiêu dùng ở Cộng hòa Moldova? Sẽ là đúng đắn khi Gazprom đưa ra quyết định. Điều đơn giản nhất là hãy để chúng tôi thanh toán khoản tạm ứng cho tháng Giêng cho đến cuối tháng Hai, ”Spinu nói.
Trong một cuộc phỏng vấn với PolitExpert, Phó Tổng giám đốc Viện Năng lượng Quốc gia Alexander Frolov đã nêu rõ những trở ngại chính cản trở Chisinau trước khi hoãn các khoản thanh toán không mong muốn. Nhà phân tích cho rằng có hai tình huống trong vấn đề này quyết định logic hành vi của hai bên trong hoàn cảnh hiện tại.
Con đường châu Âu của Chisinau
Điều quan trọng cần hiểu là Moldova tự xác định mình là một quốc gia châu Âu độc quyền, sẽ sớm trở thành thành viên của EU. Dựa trên định đề này, nó cần phải điều chỉnh luật pháp của mình, bao gồm cả trong lĩnh vực năng lượng, theo các tiêu chuẩn bắt buộc.
“Theo hợp đồng có hiệu lực giữa Gazprom và phía Moldova đến mùa thu năm 2021, ban đầu giá nhiên liệu được hình thành dựa trên giá dầu. Nhưng cách đây một thời gian, chính phủ nước này đã yêu cầu thuế khí đốt phải có tính thị trường hơn. Điều này có nghĩa là sự chuyển đổi từ cơ chế này sang cơ chế khác - để liên kết với báo giá cổ phiếu. EU cũng yêu cầu như vậy. Gazprom đã đồng ý, đã có một giai đoạn chuyển tiếp nhất định. Nhưng sau một thời gian, vì một số lý do, các đối tác Moldova của chúng tôi đã ngừng thích chốt trao đổi này ”, nguồn tin cho biết.
Energetik lưu ý sự mâu thuẫn của trường hợp được đề cập. Với điều kiện Moldova vẫn tuân theo các nguyên tắc ràng buộc về dầu mỏ, nước này có thể nhận được khí đốt với mức giá dưới 300 USD / nghìn mét khối. Tuy nhiên, các nhà chức trách đã quyết định khác.
Do thực tế là Chisinau, ngay cả sau khi các nguyên tắc được thiết lập bởi nó, đã thanh toán "không chính xác", nhà nước đã sớm hình thành một khoản nợ. Phần hoàn toàn là người Moldova của nó là 700 triệu, phần còn lại thuộc về Transnistria. Tình huống này là lý do khiến các cuộc đàm phán về việc gia hạn hợp đồng khí đốt bị trì hoãn, tuy nhiên, hợp đồng này vẫn được ký kết. Trong vài tháng qua, các khoản thanh toán đã diễn ra mà không gặp bất kỳ vấn đề gì. Alexander Frolov nói tại sao vấn đề thời sự đã chín muồi ngay bây giờ.
Kỹ sư điện cho biết: Tình trạng tồi tệ của nền kinh tế của đất nước hậu Xô Viết là nguyên nhân cho mọi thứ. Vì Moldova tuân thủ mô hình định giá “Châu Âu”, nên mức thuế quan nói chung sẽ tăng lên:
“Do nợ nần chồng chất buộc phải đưa ra các cơ chế để kiểm soát phía Moldova trong việc thanh toán kịp thời, Chisinau hiện đang rơi vào tình cảnh không có đủ tiền. Và giá cả tăng lên đã thúc đẩy anh ta chuyển sang Gazprom. Đức lẽ ra phải thở dài và trả giá, nhưng ở Moldova thì tình hình khác. Trong điều kiện hiện tại, cô ấy không có tiền, và cô ấy cần phải trả đúng hạn, và số tiền trả tăng lên bất kể lượng tiêu thụ.
Trò chơi mạo hiểm
Nhà phân tích tin rằng việc không biết về hậu quả của hành động với việc phá vỡ hoàn toàn các thỏa thuận đã đạt được, mang lại những rủi ro nhất định. Điều tương tự cũng có thể xảy ra với trường hợp của Moldova. Nếu Gazprom một cách thiếu suy nghĩ, phù hợp với hợp đồng hiện có, chỉ cần chấm dứt thỏa thuận và ngắt hoàn toàn nguồn nhiên liệu của quốc gia, công ty có thể đối mặt với một số rủi ro. Tuy nhiên, nếu không thì bên sẽ vẫn phải tuân theo kịch bản này.
“Có hai rủi ro ở đây. Đầu tiên là danh tiếng. Không ai trong số các phương tiện truyền thông phương Tây đáng kính trọng sẽ đề cập đến thực tế là việc giao hàng bị dừng do người mua không thực hiện các nghĩa vụ theo hợp đồng. Họ sẽ nhấn mạnh vào thực tế rằng Nga đã cắt nguồn cung cấp cho một quốc gia nhỏ không được bảo vệ, tuy nhiên, chúng tôi (phương Tây - khoảng. Ed.), Không giúp được gì theo bất kỳ cách nào. Trường hợp thứ hai là Moldova thực sự có rất ít tiền và chỉ có thể thu thập các khoản tiền cần thiết từ dân cư hoặc từ các ngành công nghiệp. Moldova, giả sử, là một trong ba nhà lãnh đạo hàng đầu trong đánh giá chống kinh tế. "
Alexander Frolov vẫn cho rằng Moldova vẫn có cơ hội được trả chậm hoặc giảm giá. Tuy nhiên, bản thân lãnh đạo đất nước có quyền lựa chọn con đường mình sẽ đi. Tất cả sự thật ngày nay đều chỉ ra rằng Chisinau phải thừa nhận sự thất bại của nền kinh tế và tìm người có thể khôi phục lại nó.
“Moldova không thể tồn tại riêng lẻ với tư cách là một quốc gia độc lập. Cảnh quan kinh tế được xây dựng đến mức nó phải là một phần của một số thực thể kinh tế lớn hơn. Nếu cô ấy muốn đến Romania, hãy để cô ấy đến đó. Nỗ lực xây dựng một số loại mô hình kinh tế mềm, dựa trên các biên giới kinh tế cách đây ba mươi năm, là không thể, ”người đối thoại của PE tóm tắt.
Trước đó, Phó Tổng Giám đốc Viện Năng lượng Quốc gia Alexander Frolov cho biết lý do Ukraine muốn phát triển quan hệ với Nga sau khi hết hạn hợp đồng trung chuyển vào năm 2024 theo kịch bản của Ba Lan.
Analyst Frolov: economic disaster forced Moldova to beg Gazprom for a delay
Аналитик Фролов: экономическая катастрофа заставила Молдавию умолять «Газпром» об отсрочке

 politexpert.net
politexpert.net
Đại sứ Ukraine tại Berlin chỉ trích người Đức đã bỏ qua "sự vĩ đại của người Ukraine"
Đại sứ Ukraine tại Đức Andriy Melnyk đưa ra một chỉ trích khác đối với Berlin. Theo ý kiến của ông, các nhà chức trách Đức từ chối công nhận "sự vĩ đại của đất nước Ukraine", và do đó thường phớt lờ những lợi ích hợp pháp của Kiev.
Nhà ngoại giao lưu ý rằng ngày nay những kiệt tác của các nhà soạn nhạc Ukraina không vang lên trong các nhà hát opera và giai điệu của Đức, và học sinh Đức không biết các nhà văn Ukraina. Theo Melnik, tình trạng này phải được thay đổi.
Cho đến khi những kiệt tác của các nhà soạn nhạc Ukraina trở thành một phần không thể thiếu trong các tiết mục của các nhà hát opera và hiệp hội nghệ sĩ ở Đức và thế giới, cho đến khi học sinh Đức học các nhà văn và nhà thơ của chúng ta, tất cả các yêu cầu chính trị chính trị của chúng ta sẽ phải chịu cùng một phản ứng bị kiềm chế, như vậy , thật không may, thường là trường hợp.
đại sứ nói.
Melnyk lưu ý với sự tiếc nuối rằng toàn bộ lịch sử của Ukraine, tất cả "di sản quốc gia" của nó chỉ được nhìn qua lăng kính của Nga.
Đại sứ Ukraine cũng than thở rằng những tuyên bố của ông về quan chức Berlin thường bị cho là cực kỳ tiêu cực, và ông đã nhiều lần nghe lời khuyên kiên quyết của chính quyền địa phương để tiết chế các thành phần truyền thông trong chính sách ngoại giao Ukraine.
The Ukrainian ambassador in Berlin criticized the Germans for ignoring the "greatness of the Ukrainians"
Украинский посол в Берлине раскритиковал немцев за игнорирование «величия украинцев»
Украинский посол в Берлине раскритиковал немцев за игнорирование «величия украинцев»
Посол Украины в Германии Андрей Мельник выступил с очередной критикой в адрес Берлина. По его мнению, немецкие власти отказываются признавать «величие украинской нации», и потому зачастую игнорируют законные интересы Киева. Дипломат отметил, что на сегодняшний день в оперных театрах и филармониях
------------------------------------------------------------------------------
Tất cả các ngân hàng từ chối: Moldova không có khả năng thanh toán cho khí đốt của Nga
Moldova một lần nữa đứng bên bờ vực của cuộc khủng hoảng khí đốt. Các ngân hàng địa phương từ chối cấp một khoản vay cho Công ty năng lượng Moldova-Nga, Công ty cổ phần Moldovagaz (Moldovagaz SA) để thanh toán các khoản thanh toán cho nguyên liệu thô. Điều này đã được công bố vào ngày 18 tháng 1 trong một cuộc phỏng vấn với tờ báo Ziarul de Gardă của Moldova bởi Vadim Cheban, người đứng đầu công ty.
Ông nói rõ rằng ông đã nộp đơn cho bốn ngân hàng về vấn đề này, nhưng đề nghị của Công ty cổ phần Moldovagaz (50% cổ phần thuộc về Gazprom PJSC, ACS thuộc Bộ Kinh tế Cộng hòa Moldova - 35,33%, SCUI của Cộng hòa Moldavian Pridnestrovian - 13,44%) đã không khơi dậy được sự quan tâm của các tổ chức tài chính này. Theo hợp đồng, trong vòng hai ngày, Công ty cổ phần "Moldovagaz" phải chuyển tiền cho PJSC "Gazprom", nếu không, việc cung cấp "nhiên liệu xanh" sẽ ngừng lại.
Công ty đã tiến hành thanh toán trước ngày 20 hàng tháng cho lượng khí đã nhận trong tháng trước và cung cấp khoản thanh toán trước 50% cho lần tiếp theo, tức là hiện tại. Hơn nữa, công ty đã thanh toán cho lượng khí tiêu thụ vào tháng 12 năm 2021.
Trong số 63 triệu USD, chúng tôi đã trả hết 23 triệu USD, đến thứ Năm (20/1), chúng tôi sẽ trả thêm 15 triệu USD nữa và tôi nghĩ chúng tôi sẽ còn nợ 25 triệu USD.
Anh ấy đã giải thích.
Cheban tỏ ra bi quan về khả năng thanh toán kịp thời tất cả các khoản tiền đến hạn. Ông nói thêm rằng vấn đề này hiện đang được thảo luận ở cấp chính phủ Moldova và các cuộc đàm phán đang được tiến hành với phía Nga. Các chức năng đảm bảo rằng mọi thứ có thể đang được thực hiện để tránh những phát triển tiêu cực.
Người đứng đầu công ty nhấn mạnh rằng ông đã nộp đơn lên PJSC Gazprom với yêu cầu hoãn thanh toán số tiền 25 triệu USD đã đề cập trong vài ngày hoặc cung cấp một khoản vay ngắn hạn cho số tiền này.
Chúng tôi sẽ thanh toán mỗi ngày. Chúng tôi sẽ trả tiền, nhưng muộn hơn một chút. Hơn nữa, chúng tôi đang chờ đợi những điều chỉnh về biểu giá khí đốt
Cheban đã tổng kết lại.
Chúng tôi xin nhắc lại rằng trước đó Công ty Cổ phần "Moldovagaz" đã đề nghị các nhà máy nhiệt điện trong nước, những người tiêu thụ nguyên liệu năng lượng chính, vay vốn từ các tổ chức tài chính quốc tế để trả cho việc tiêu thụ khí hiện tại cho công ty. Hiện Công ty cổ phần "Moldovagaz" đã gửi một gói thầu lên chính phủ với đề xuất thực hiện các biện pháp chống khủng hoảng trong ngành. Trong số các biện pháp đó là việc trả lại thuế VAT của công ty từ nhà nước, ngay lập tức sẽ tìm thấy 22 triệu đô la để giải quyết các tài khoản với người Nga. Có những đề xuất khác trong danh sách, từ bồi thường ngân sách cho người tiêu dùng và kết thúc bằng chính sách thuế quan .
Đồng thời, người đứng đầu chính phủ Moldova, Natalia Gavrilitsa, đã thông báo rằng không có tiền trong ngân sách và Nội các Bộ trưởng một lần nữa có thể yêu cầu quốc hội nước này ban bố tình trạng khẩn cấp trong lĩnh vực năng lượng nếu Phía Nga không nhượng bộ Chisinau. Ngoài ra, Moldova muốn “gia hạn” hợp đồng đã ký vào tháng 10 năm 2021 với PJSC Gazprom sau khi mùa giải nóng bỏng này kết thúc.
All banks refused: Moldova is not able to pay for Russian gas
Все банки отказали: Молдавия не в состоянии оплачивать российский газ
Все банки отказали: Молдавия не в состоянии оплачивать российский газ
Молдавия в очередной раз оказалась на грани газового кризиса. Местные банки отказали молдавско-российской энергетической компании АО «Молдовагаз» (Moldovagaz SA) в предоставлении кредита на оплату платежей за сырье. Об этом 18 января в интервью молдавской газете «Зиарул де Гардэ» (Ziarul de Gardă)
------------------------------------------------------------------------
Một góc nhìn từ phía Nga
Nhà phân tích Frolov: Thảm họa kinh tế buộc Moldova phải xin Gazprom trì hoãn
Moldova đã tìm đến Nga để cầu cứu vì không có khả năng trả khoản nợ nhiên liệu. Nhà phân tích Alexander Frolov nêu ra hai lý do dẫn đến lỗ ngân sách ở Chisinau.
Phó Thủ tướng Chính phủ Moldova Andrei Spinu đã chuyển sang người đứng đầu Gazprom, Alexei Miller, để người đứng đầu Gazprom giúp nước cộng hòa giải quyết các nghĩa vụ nợ của đất nước. Theo chính trị gia, Moldovagaz thiếu 25-30 triệu đô la trước khi thanh toán toàn bộ chi phí tạm ứng.
“Gazprom là cổ đông chính của Moldovagaz. Câu hỏi đặt ra là, cổ đông lớn làm gì để đảm bảo rằng công ty cung cấp khí đốt cho người tiêu dùng ở Cộng hòa Moldova? Sẽ là đúng đắn khi Gazprom đưa ra quyết định. Điều đơn giản nhất là hãy để chúng tôi thanh toán khoản tạm ứng cho tháng Giêng cho đến cuối tháng Hai, ”Spinu nói.
Trong một cuộc phỏng vấn với PolitExpert, Phó Tổng giám đốc Viện Năng lượng Quốc gia Alexander Frolov đã nêu rõ những trở ngại chính cản trở Chisinau trước khi hoãn các khoản thanh toán không mong muốn. Nhà phân tích cho rằng có hai tình huống trong vấn đề này quyết định logic hành vi của hai bên trong hoàn cảnh hiện tại.
Con đường châu Âu của Chisinau
Điều quan trọng cần hiểu là Moldova tự xác định mình là một quốc gia châu Âu độc quyền, sẽ sớm trở thành thành viên của EU. Dựa trên định đề này, nó cần phải điều chỉnh luật pháp của mình, bao gồm cả trong lĩnh vực năng lượng, theo các tiêu chuẩn bắt buộc.
“Theo hợp đồng có hiệu lực giữa Gazprom và phía Moldova đến mùa thu năm 2021, ban đầu giá nhiên liệu được hình thành dựa trên giá dầu. Nhưng cách đây một thời gian, chính phủ nước này đã yêu cầu thuế khí đốt phải có tính thị trường hơn. Điều này có nghĩa là sự chuyển đổi từ cơ chế này sang cơ chế khác - để liên kết với báo giá cổ phiếu. EU cũng yêu cầu như vậy. Gazprom đã đồng ý, đã có một giai đoạn chuyển tiếp nhất định. Nhưng sau một thời gian, vì một số lý do, các đối tác Moldova của chúng tôi đã ngừng thích chốt trao đổi này ”, nguồn tin cho biết.
Energetik lưu ý sự mâu thuẫn của trường hợp được đề cập. Với điều kiện Moldova vẫn tuân theo các nguyên tắc ràng buộc về dầu mỏ, nước này có thể nhận được khí đốt với mức giá dưới 300 USD / nghìn mét khối. Tuy nhiên, các nhà chức trách đã quyết định khác.
Do thực tế là Chisinau, ngay cả sau khi các nguyên tắc được thiết lập bởi nó, đã thanh toán "không chính xác", nhà nước đã sớm hình thành một khoản nợ. Phần hoàn toàn là người Moldova của nó là 700 triệu, phần còn lại thuộc về Transnistria. Tình huống này là lý do khiến các cuộc đàm phán về việc gia hạn hợp đồng khí đốt bị trì hoãn, tuy nhiên, hợp đồng này vẫn được ký kết. Trong vài tháng qua, các khoản thanh toán đã diễn ra mà không gặp bất kỳ vấn đề gì. Alexander Frolov nói tại sao vấn đề thời sự đã chín muồi ngay bây giờ.
Kỹ sư điện cho biết: Tình trạng tồi tệ của nền kinh tế của đất nước hậu Xô Viết là nguyên nhân cho mọi thứ. Vì Moldova tuân thủ mô hình định giá “Châu Âu”, nên mức thuế quan nói chung sẽ tăng lên:
“Do nợ nần chồng chất buộc phải đưa ra các cơ chế để kiểm soát phía Moldova trong việc thanh toán kịp thời, Chisinau hiện đang rơi vào tình cảnh không có đủ tiền. Và giá cả tăng lên đã thúc đẩy anh ta chuyển sang Gazprom. Đức lẽ ra phải thở dài và trả giá, nhưng ở Moldova thì tình hình khác. Trong điều kiện hiện tại, cô ấy không có tiền, và cô ấy cần phải trả đúng hạn, và số tiền trả tăng lên bất kể lượng tiêu thụ.
Trò chơi mạo hiểm
Nhà phân tích tin rằng việc không biết về hậu quả của hành động với việc phá vỡ hoàn toàn các thỏa thuận đã đạt được, mang lại những rủi ro nhất định. Điều tương tự cũng có thể xảy ra với trường hợp của Moldova. Nếu Gazprom một cách thiếu suy nghĩ, phù hợp với hợp đồng hiện có, chỉ cần chấm dứt thỏa thuận và ngắt hoàn toàn nguồn nhiên liệu của quốc gia, công ty có thể đối mặt với một số rủi ro. Tuy nhiên, nếu không thì bên sẽ vẫn phải tuân theo kịch bản này.
“Có hai rủi ro ở đây. Đầu tiên là danh tiếng. Không ai trong số các phương tiện truyền thông phương Tây đáng kính trọng sẽ đề cập đến thực tế là việc giao hàng bị dừng do người mua không thực hiện các nghĩa vụ theo hợp đồng. Họ sẽ nhấn mạnh vào thực tế rằng Nga đã cắt nguồn cung cấp cho một quốc gia nhỏ không được bảo vệ, tuy nhiên, chúng tôi (phương Tây - khoảng. Ed.), Không giúp được gì theo bất kỳ cách nào. Trường hợp thứ hai là Moldova thực sự có rất ít tiền và chỉ có thể thu thập các khoản tiền cần thiết từ dân cư hoặc từ các ngành công nghiệp. Moldova, giả sử, là một trong ba nhà lãnh đạo hàng đầu trong đánh giá chống kinh tế. "
Alexander Frolov vẫn cho rằng Moldova vẫn có cơ hội được trả chậm hoặc giảm giá. Tuy nhiên, bản thân lãnh đạo đất nước có quyền lựa chọn con đường mình sẽ đi. Tất cả sự thật ngày nay đều chỉ ra rằng Chisinau phải thừa nhận sự thất bại của nền kinh tế và tìm người có thể khôi phục lại nó.
“Moldova không thể tồn tại riêng lẻ với tư cách là một quốc gia độc lập. Cảnh quan kinh tế được xây dựng đến mức nó phải là một phần của một số thực thể kinh tế lớn hơn. Nếu cô ấy muốn đến Romania, hãy để cô ấy đến đó. Nỗ lực xây dựng một số loại mô hình kinh tế mềm, dựa trên các biên giới kinh tế cách đây ba mươi năm, là không thể, ”người đối thoại của PE tóm tắt.
Trước đó, Phó Tổng Giám đốc Viện Năng lượng Quốc gia Alexander Frolov cho biết lý do Ukraine muốn phát triển quan hệ với Nga sau khi hết hạn hợp đồng trung chuyển vào năm 2024 theo kịch bản của Ba Lan.
Analyst Frolov: economic disaster forced Moldova to beg Gazprom for a delay
Аналитик Фролов: экономическая катастрофа заставила Молдавию умолять «Газпром» об отсрочке
Рискованная игра
Молдова обратилась за помощью к России, потому что оказалась не в состоянии выплатить долг за топливо. Аналитик Александр Фролов назвал две причины бюджетной дыры Кишинева.
politexpert.net
- Biển số
- OF-626585
- Ngày cấp bằng
- 24/3/19
- Số km
- 8,426
- Động cơ
- 310,264 Mã lực
Bọn Nga đua tàu ngầm mini hả bác?
)")
- Biển số
- OF-796427
- Ngày cấp bằng
- 12/11/21
- Số km
- 62
- Động cơ
- 22,621 Mã lực
cái thành phố trong video là New York thì phải,mấy ông NgaBọn Nga đua tàu ngầm mini hả bác?

Chỉnh sửa cuối:
Không care thù vài thớt này đọc làm đếch gì hở bạn? Hay muốn gây ware thì chả care gì thằng Nga cho lắm, nó chả có ảnh hưởng mọe gì đến VN cả. Tất cả các sp e đang dùng chả có gì của Nga thì việc quái gì e phải đọc tin tức về nó nhỉ.

- Biển số
- OF-796427
- Ngày cấp bằng
- 12/11/21
- Số km
- 62
- Động cơ
- 22,621 Mã lực
Sự tiến bộ của nhân loại trong Chiến tranh
Lạnh là vô song trong hàng chục nghìn năm
lịch sử.
Lạnh là vô song trong hàng chục nghìn năm
lịch sử.
- Biển số
- OF-626585
- Ngày cấp bằng
- 24/3/19
- Số km
- 8,426
- Động cơ
- 310,264 Mã lực
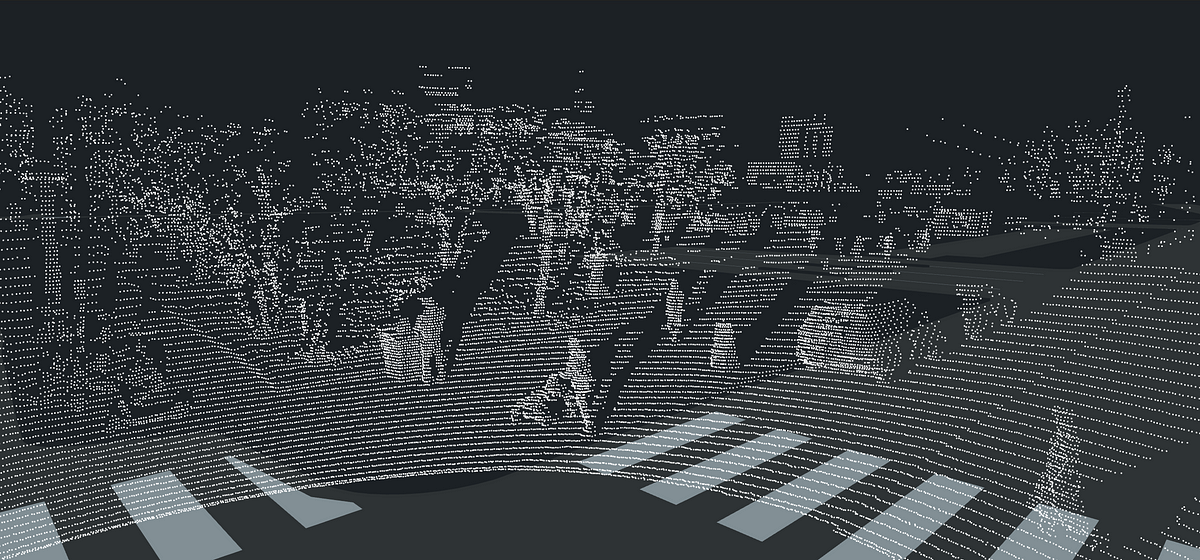
Tiếp vụ Yandex sử dụng Lidar của bản thân mình cho xe tự lái của chính họ. Như đã từng nói không ít lần từ những vol trước kể từ vol 1, trước đây, trên xe ô tô tự lái AI (trí tuệ nhân tạo) của Yandex chỉ có bộ não (chương trình AI điều khiển xe) là của Yandex, còn con mắt (thiết bị Lidar) là mua của Mỹ. Sau đó Yandex tự phát triển Lidar của mình, nhờ đó tiết kiệm hẳn chi phíTừ vol 2 đến giờ, các xe ô tô tự lái bằng trí tuệ nhân tạo (AI) đã được giới thiệu nhiều với tin tức, video về sự hoạt động của nó ở Nga, Israel, Mỹ. Phần mềm trí tuệ nhân tạo, tức bộ não dĩ nhiên của Yandex, nhưng đôi mắt, tức thiết bị Lidar thì vẫn dùng thiết bị của Mỹ. Sau đó thì Yandex đã phát triển thiết bị Lidar của mình, và thử nghiệm cho thấy tiết kiệm rất nhiều chi phí. Bây giờ họ bắt đầu quyết định thay thế Lidar của Mỹ bằng Lidar của mình quy mô lớn hơn
Yandex đã chuyển đội xe không người lái của mình sang lidar của riêng mình
Yandex đã trang bị cho tất cả các phương tiện xe ô tô tự lái của họ dựa trên Hyundai Sonata với lidar do chính hãng sản xuất. Công ty có kế hoạch trang bị cho tất cả các thế hệ xe không người lái tương lai của mình những chiếc lidar này.
Lidar là một trong những cảm biến quan trọng của xe không người lái. Anh ta quét không gian bằng chùm tia laze (laser beams) an toàn cho con người và vẽ ra bản đồ ba chiều của thế giới xung quanh. Bằng cách xử lý các tia phản xạ, lidar có thể xác định hình dạng của các vật thể ở khoảng cách vài trăm mét, kể cả trong bóng tối. Lidar giúp xe không người lái hiểu vị trí của nó trong không gian với độ chính xác đến từng centimet bằng cách so sánh kết quả quét với bản đồ 3D tích hợp sẵn.
Một tính năng quan trọng của lidar của Yandex là cấu hình linh hoạt của các thông số. Nó phát ra hàng triệu xung mỗi giây, quét không gian với các chùm tia, vị trí của chúng có thể thay đổi trong thời gian thực tùy thuộc vào các tình huống đường đi. Vì vậy, khi lái xe trên đường hẹp, nơi có nhiều người đi bộ, lidar có thể tập trung chùm tia vào đường phía trước xe, và trên đường cao tốc rộng - tập trung vào các đối tượng ở xa. Thay đổi cài đặt sẽ giúp bạn có thể nhận ra xe khách ở khoảng cách 200 mét và xe tải ở khoảng cách 500 mét.
“Không giống như các nhà sản xuất khác, cung cấp cho chúng tôi dữ liệu làm sẵn, các công cụ hỗ trợ của chính chúng tôi cho phép chúng tôi nhận thông tin thô. Khả năng tự phân tích dữ liệu này và đồng bộ hóa nó với dữ liệu từ các cảm biến khác giúp chúng ta tìm hiểu thêm nhiều điều về thế giới xung quanh. Với kiến thức bổ sung này, chúng tôi có thể cải thiện các thành phần khác nhau của công nghệ không người lái của mình, ” Dmitry Solomentsev , người đứng đầu nhóm phát triển Yandex lidar cho biết.
Ngoài ra, việc sản xuất lidar của chính mình giúp tối ưu hóa chi phí của thiết bị. Với mức giá tương đương với các lidar của bên thứ ba đã sử dụng trước đây, cảm biến của Yandex có nhiều tính năng tiên tiến hơn đáng kể. Khi chuyển sang sản xuất hàng loạt, điều này có khả năng làm cho công nghệ xe không người lái có khả năng mở rộng hơn.
Những chiếc xe được trang bị lidar riêng của Yandex đã đi được hơn 500 nghìn km và đã khẳng định được độ tin cậy của chúng. Ngoài ra, công ty đang phát triển lidar 2 bên hông (side lidars) dành cho ô tô tự lái và lidars dành cho robot giao hàng tự động (Yandex Rover)
Yandex transferred its unmanned fleet to its own lidars
«Яндекс» перевел свой беспилотный флот на собственные лидары

«Яндекс» перевел свой беспилотный флот на собственные лидары
Компания планирует оборудовать этими лидарами все последующие поколения своих беспилотниковwww.cnews.ru
Yandex tung ra các lidar ty độc quyền trên toàn đội xe tự lái
Lidar là một cảm biến quan trọng đối với ô tô tự lái. Các Lidar sử dụng ánh sáng laser để quét môi trường xung quanh và tạo ra một bức tranh 3D về thế giới bên ngoài. Sử dụng các tín hiệu phản xạ, lidars phát hiện hình dạng của các vật thể khác nhau ở gần và khoảng cách đến chúng đến từng cm ngay cả trong bóng tối. Chúng cũng cho phép các phương tiện tự hành xác định chính xác vị trí của chúng trên đường bằng cách so sánh hình ảnh 3D mà chúng tạo ra với bản đồ 3D được tích hợp sẵn.
Yandex bắt đầu sản xuất Lidar của riêng mình vào mùa xuân năm 2019 và chín tháng sau đó, bắt đầu thử nghiệm những chiếc xe không người lái đầu tiên được trang bị Lidar của mình trên các đường phố thành phố. Ngày nay, sau hai năm phát triển nữa, xe tự lái đã hoàn toàn chuyển sang sử dụng lidars cùng với phần mềm độc quyền của riêng mình làm cảm biến chính. Tất cả các xe ô tô thế hệ thứ tư của công ty đã được trang bị chúng và chúng cũng sẽ được đưa vào tất cả các xe ô tô mới của công ty trong tương lai. Bài đăng trên blog này trình bày chi tiết các tính năng chính của lidar của công ty và giải thích lý do tại sao việc có một cảm biến độc quyền lại quan trọng như vậy đối với sự phát triển của công nghệ tự lái.
Để bắt đầu, một software-defined lidar (SDL) là gì? Nó là một cảm biến có các thông số bao gồm số lượng chùm tia, góc nhìn, phạm vi và những thông số khác có thể được thay đổi trước hoặc khi xe đang di chuyển, tùy thuộc vào nhiệm vụ và điều kiện giao thông mà nó đang phải đối mặt. Ví dụ, cảm biến này có thể tăng mật độ đám mây điểm trong khu vực gần xe khi xe đang di chuyển qua sân trong hoặc tăng phạm vi khi lái xe với tốc độ cao trên đường cao tốc. Tính năng này cũng có thể được sử dụng cho các vấn đề phức tạp hơn, chẳng hạn như tăng độ phân giải chính xác trong khu vực mà các thuật toán báo cáo một mức độ không chắc chắn nhất định trong nhận dạng đối tượng.
Xe di chuyển từ đường hẹp ra đường cao tốc. Lidar chuyển từ dạng quét cận cảnh sang dạng quét tầm xa. Điều này cho phép hệ thống nhìn thấy các vật thể ở xa chi tiết hơn nhiều.
Do bản chất phần mềm xác định của lidar của công ty, nó không có bất kỳ thông số thiết yếu cố định nào, chẳng hạn như phạm vi phát hiện hoặc độ phân giải. Thay đổi các thông số của tia laser và hệ thống quét, chúng ta có thể đạt tới phạm vi lên đến 500 mét và độ phân giải 0,1 ở mọi hướng. Điều này có nghĩa là kiểu quét của máy quét của chúng tôi có thể thay đổi theo thời gian thực, chọn các đặc tính quét phù hợp nhất với từng tình huống.
Vì vậy, khi lái xe trên một con phố hẹp với dòng xe cộ đông đúc, chúng ta có thể tập trung hầu hết các tia sáng trên đường phía trước xe, làm tăng mật độ mây đáng kể để nhận biết các vật thể gần đó. Mặt khác, trên đường cao tốc rộng rãi, điều quan trọng hơn là nhìn thấy các vật thể ở xa. Thay đổi cài đặt tương ứng sẽ làm tăng mật độ trong khu vực mong muốn và giúp bạn có thể nhận ra xe khách ở khoảng cách 200 mét hoặc xe đầu kéo ở khoảng cách 500 mét. Phạm vi này cũng rất quan trọng đối với việc định vị phương tiện với sự trợ giúp của thuật toán định vị lidar ở những khu vực không có mật độ phát triển gần đường, chẳng hạn như đại lộ rộng, đường cao tốc và cầu vượt.
Yandex Software-Defined LiDAR
Khả năng linh hoạt trong việc thiết lập các thông số là nhờ vào thiết kế hệ thống quét của lidar. Ngoài ra, không có các phần tử điện tử quay bên trong nó, có nghĩa là những loại nắp này đáng tin cậy hơn và ít bị biến dạng nhiệt, điều mà chúng ta đã gặp trước đó khi sử dụng nắp xoay. Xe trượt ở trạng thái rắn của chúng tôi hoạt động tốt như nhau trên đường thực ở nhiệt độ từ -30 độ C đến +30 độ C, phạm vi nhiệt độ hàng năm thông thường ở Nga và các quốc gia và khu vực khác có khí hậu lục địa rõ rệt.
Việc sử dụng phương pháp tiếp cận do phần mềm xác định có thể thực hiện được khi cảm biến và công nghệ tự lái được gắn với nhau. Việc kiểm soát cảm biến chính cũng mang lại những lợi ích khác, chẳng hạn như truy cập vào dữ liệu thô, thu thập các bộ dữ liệu chuyên biệt và tất nhiên, tối ưu hóa giá cả. Công ty đã đầu tư rất nhiều nỗ lực vào việc phát triển lidar của riêng mình. Kết quả là, chúng tôi đã có thể đi, trong vòng chưa đầy ba năm, từ ý tưởng đến một mô hình sản xuất, về nhiều mặt, vượt trội hơn những chiếc nắp thùng mà chúng tôi đang sử dụng trước đây, đồng thời chi phí cho chúng tôi cùng một khoản tiền. Công ty đã có thể duy trì tốc độ này bằng cách ngay lập tức thử nghiệm các giả thuyết và cải tiến của mình bằng cách sử dụng nắp đậy trên xe ô tô tự lái thực tế. Cho đến nay, các phương tiện của công ty đã đi hơn 500.000 km bằng cách sử dụng Lidar độc quyền của công ty, chứng tỏ chức năng và độ tin cậy của chúng.
Công ty đã đạt được một cột mốc quan trọng sẽ tiếp tục hoàn thiện những cái nắp của mình cũng như phát triển những cái mới. Công ty đang thử nghiệm các nguyên mẫu của nắp xoay bên để phát hiện trường gần và công ty cũng đang thiết kế lidar cho rô bốt giao hàng tự động của mình.
Yandex rolls out proprietary lidars across AV fleet
Yandex rolls out proprietary lidars across AV fleet
Lidar is an important sensor for self-driving cars. Lidars use laser light to scan their surroundings and create a 3D picture of the…
 medium.com
medium.com
----------------------------------------------------------------------------------------
Aug2
Có thể bác cũng quan tâm cái này
Ở các vol trước có nói về một số sản phẩm trí tuệ nhân tạo thú vị của Sher, ví dụ mạng neuron ruDALL-E có khả năng vẽ hình dựa trên mô tả văn bản bằng các thứ tiếng khác nhau (kể cả tiếng VN) - sinh hình ảnh từ mô tả text, hay tạo biểu tượng cảm xúc từ mô tả text. Hay Visper sinh video với mô tả text, nó đã tạo ra những nhân vật ảo (Visual Character) tạo nên nhờ trí tuệ nhân tạo và xuất hiện trên truyền hình với tư cách là người đồng dẫn chương trình của kênh truyền hình RBC, mạng nơ-ron ruGPT-3 để viết mã chương trình, giúp các lập trình viên viết chương trình, hoàn thành code của họ.
Đây lại là 1 sản phẩm AI thú vị nữa của Sher
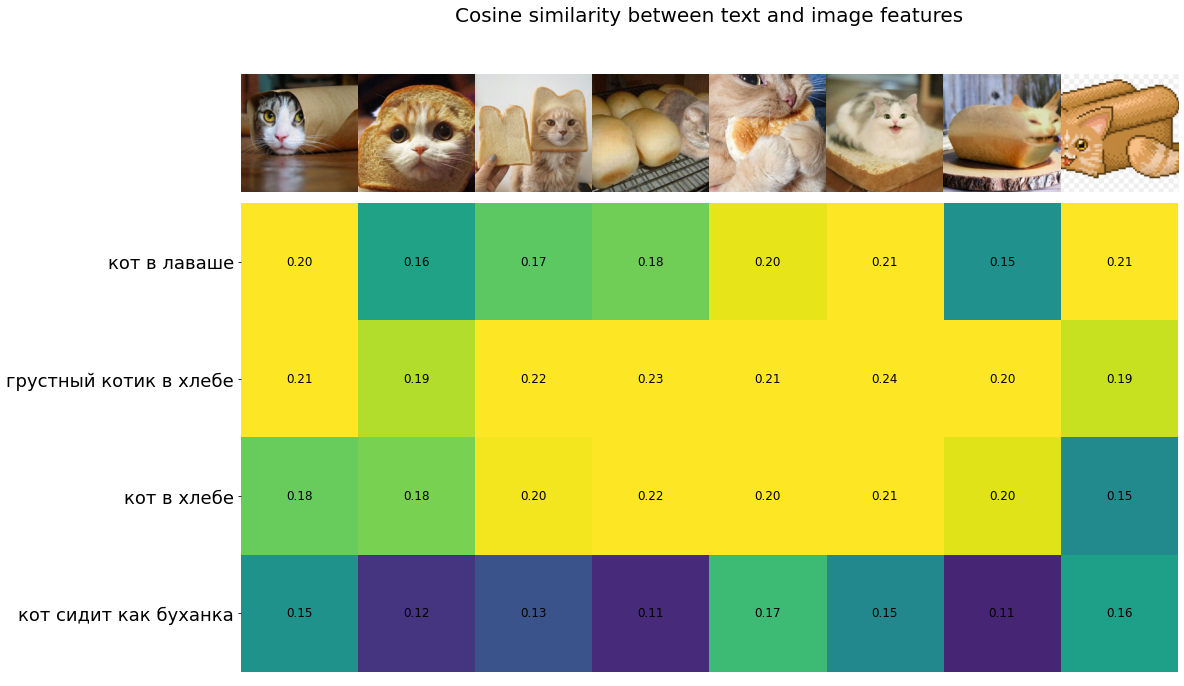
Sber đã tung ra phiên bản phóng to mới của mô hình ruCLIP cho công chúng
Dòng mô hình ruCLIP để xếp hạng hình ảnh và chú thích bằng tiếng Nga, cũng như đánh giá sự giống nhau về ngữ nghĩa của hình ảnh và văn bản, do nhóm Sber AI và SberDevices phát triển, đã có sẵn trên GitHub, ngoài ra mô hình ruCLIP Small được xuất bản trước đây.
Link
GitHub - ai-forever/ru-clip: CLIP implementation for Russian language
CLIP implementation for Russian language. Contribute to ai-forever/ru-clip development by creating an account on GitHub.
 github.com
github.com
ruCLIP — мультимодальная модель для русского языка
Известно, что глубокие нейронные сети (DNN) и модели компьютерного зрения, в частности, хорошо справляются с конкретными задачами, но зачастую не могут сделать обобщение при работе с новыми. Так,...
 habr.com
habr.com
Các phiên bản công nghiệp với chất lượng và số lượng thông số cao nhất - độc quyền ruCLIP Base và ruCLIP Large độc quyền - có sẵn trong trung tâm của các mô hình, bộ dữ liệu và bộ chứa DataHub được pre-training trước trên nền tảng SberCloud ML Space.
DataHub ML Space
Маркетплейс датасетов, моделей, контейнеров и других материалов для эффективной разработки
 sbercloud.ru
sbercloud.ru
Các mô hình này trên một số bộ dữ liệu đã vượt qua thành công tập hợp của mô hình CLIP gốc tiếng Anh và trình dịch Nga-Anh.
Việc traing thành công ruCLIP và sự sẵn có của các mô hình trong mã nguồn mở sẽ cho phép giải quyết nhiều vấn đề về thị giác máy tính trong các sản phẩm và dịch vụ khác nhau ở chế độ zero-shot, tức là mà không cần đào tạo thêm tốn kém.
Bản phát hành bao gồm sáu mô hình ruCLIP, đặc biệt, khác nhau về kích thước của bản vá được sử dụng (14x14, 16x16, 32x32) và kích thước của hình ảnh đầu vào (224x224, 336x336 và 384x384). Ngữ nghĩa của tên model như sau: ruclip-vit-base-patch16-224; ruclip-vit-base-patch32-224; ruclip-vit-base-patch32-384 - ruCLIP Base; ruclip-vit-large-patch14-224 - ruCLIP Lớn; ruclip-vit-large-patch14-336 - ruCLIP Lớn độc quyền - chỉ có DataHub SberCloud ML Space; ruclip-vit-base-patch16-384 - độc quyền ruCLIP Base - chỉ khả dụng trong DataHub SberCloud ML Space.
Bạn có thể xem so sánh chi tiết của tất cả sáu mô hình mới được đào tạo trong kho lưu trữ trên GitHub . Khóa đào tạo dựa trên tập dữ liệu tự tập hợp gồm 240 triệu cặp và kéo dài 12 ngày trên 256 Tesla GPU A100 trên nền tảng SberCloud ML Space.

sberbank-ai/ruclip-vit-base-patch16-224 · Hugging Face
We’re on a journey to advance and democratize artificial intelligence through open source and open science.
huggingface.co

sberbank-ai/ruclip-vit-base-patch32-224 · Hugging Face
We’re on a journey to advance and democratize artificial intelligence through open source and open science.
huggingface.co

sberbank-ai/ruclip-vit-base-patch32-384 · Hugging Face
We’re on a journey to advance and democratize artificial intelligence through open source and open science.
huggingface.co

sberbank-ai/ruclip-vit-large-patch14-224 · Hugging Face
We’re on a journey to advance and democratize artificial intelligence through open source and open science.
huggingface.co
DataHub ML Space
Маркетплейс датасетов, моделей, контейнеров и других материалов для эффективной разработки
sbercloud.ru
ML Space - Платформа для ML-разработки полного цикла
Платформа для работы DS-команд ML Space от SberCloud.
sbercloud.ru
Alexander Vedyakhin , Phó Chủ tịch thứ nhất Hội đồng quản trị của Sberbank, cho biết: “Hệ sinh thái Sber là một trong những công ty hàng đầu trong lĩnh vực giải pháp ML - ngày nay chúng tôi cung cấp cho các nhà phát triển, nhà khoa học dữ liệu và đại diện doanh nghiệp ngày càng nhiều công cụ và dịch vụ: từ các nền tảng để phát triển ML như SberCloud ML Space để hoàn thiện các giải pháp ML như SmartSpeech. Cũng trong năm qua, các nhóm kết hợp của Sber AI và SberDevicesđã phát hành một số transformer model- ruGPT-3 & family - trong số đó là ruDALL-E chuyển văn bản thành hình ảnh phổ biến. Các mô hình chiếm các dòng xếp hạng đầu tiên của các điểm chuẩn khác nhau và, không giống như hầu hết các giải pháp tương tự, được đặt trong miền công cộng. Các mô hình công nghiệp độc quyền có sẵn trong DataHub SberCloud ML Space. Tất cả điều này cho phép các doanh nghiệp giải quyết nhiều vấn đề nhằm tạo ra sản phẩm đột phá của riêng mình dựa trên ML, tăng tốc thời gian đưa ra thị trường và giảm chi phí phát triển ”.
Sber AI là bộ phận R&D của Sber chịu trách nhiệm phát triển các công nghệ trí tuệ nhân tạo và triển khai chúng trong các lĩnh vực khác nhau của cuộc sống và kinh doanh.
SberDevices là một công ty trong hệ sinh thái Sber, một trung tâm chuyên về các giải pháp dựa trên AI trong các lĩnh vực như công nghệ giọng nói, công nghệ hiểu ngôn ngữ tự nhiên, sinh trắc học khuôn mặt và giọng nói. Công ty cũng tập trung vào việc tạo ra các thiết bị thông minh cho người tiêu dùng cuối cùng và khách hàng doanh nghiệp. SberDevices được thành lập vào tháng 5 năm 2019 với tư cách là Bộ phận thuộc khối Công nghệ của Sberbank.
SberCloud là nền tảng hệ sinh thái đám mây của Sber. Công ty cung cấp một loạt các giải pháp đám mây nền tảng và cơ sở hạ tầng, cũng như các công cụ để làm việc với trí tuệ nhân tạo, dựa trên tài nguyên của các siêu máy tính Christofari và Christofari Neo. Các nền tảng và dịch vụ công nghệ thông tin SberCloud là xương sống của hệ sinh thái kỹ thuật số của Sber và được cung cấp cho các khách hàng bên ngoài - các công ty, tổ chức chính phủ và cá nhân.
Sber posted new enlarged versions of the ruCLIP model to the public
«Сбер» выложил в открытый доступ новые увеличенные версии модели ruCLIP
«Сбер» выложил в открытый доступ новые увеличенные версии модели ruCLIP
Линейка моделей ruCLIP для ранжирования изображений и подписей к ним на русском языке, а также оценки семантической...
www.cnews.ru

Сбер выложил в открытый доступ новые увеличенные версии модели ruCLIP
Линейка моделей ruCLIP для ранжирования изображений и подписей к ним на русском языке, а также оценки семантической близости изображений и текстов, разработанная командами Sber AI и SberDevices, стала доступна на GitHub, в дополнение к ранее опубликованной модели ruCLIP Small.

Сбер выложил в открытый доступ новые увеличенные версии модели ruCLIP
Линейка моделей ruCLIP для ранжирования изображений и подписей к ним на русском языке, а также оценки семантической близости изображений и текстов, разработанная командами Sber AI и SberDevices, стала доступна на GitHub, в дополнение к ранее опубликованной модели ruCLIP Small.
SberCloud - Облачная платформа Группы Сбербанк
SberCloud (ООО «Облачные технологии») – облачная платформа Группы Сбербанк. Облачная IT-инфраструктура в аренду. Суперкомпьютер Christofari. Вычислительные ресурсы, хранение данных в облаке, мониторинг и управление, сервисы для Big Data.
sbercloud.ru
Chỉnh sửa cuối:
- Biển số
- OF-626585
- Ngày cấp bằng
- 24/3/19
- Số km
- 8,426
- Động cơ
- 310,264 Mã lực
Quay lại công ty trí tuệ nhân tạo Smart Engines đươc nói quá nhiều từ vol trước đến vol này, và vừa được nói ở cách đây vài post xong. Họ không chỉ phát triển các sản phẩm trí tuệ nhân tạo AI để nhận dạng tài liệu
Sản phẩm Smart Tomo Engine của họ dùng để tái tạo hình ảnh chụp cắt lớp (tomographic reconstruction), cũng đã kiểm thử và chạy tốt trên các máy chủ (server), máy trạm (workstation), etc với dòng chip CPU Elbrus của Nga
Phát triển và thử nghiệm chương trình Smart Tomo Engine để tái tạo hình chụp cắt lớp sử dụng nền tảng Elbrus
Hôm nay bài viết của chúng tôi sẽ tập trung vào hai chủ đề yêu thích của chúng tôi: chụp cắt lớp vi tính (CT - computed tomography) và bộ xử lý do Nga sản xuất có tên là Elbrus. Chúng ta sẽ nói về sự khác biệt giữa kết quả chụp X-quang và chụp CT và giải thích lý do tại sao một thiết bị lớn và nghiêm trọng như máy chụp cắt lớp lại có thể thực sự sử dụng một máy tính chuyên dụng. Mặc dù thực tế là máy chụp cắt lớp đã được sử dụng gần 50 năm (việc phát minh ra máy chụp cắt lớp đầu tiên được công bố vào năm 1972 [1]), vẫn còn rất nhiều vấn đề cần giải quyết trong lĩnh vực chụp cắt lớp vi tính. Có nhu cầu mạnh mẽ về các thuật toán mới cho chụp cắt lớp vi tính sẽ nhanh hơn và chính xác hơn so với các thuật toán đã có và có thể làm giảm sự tiếp xúc của một vật thể với bức xạ. Điều đó, đến lượt nó, sẽ mở rộng đáng kể phạm vi áp dụng của phương pháp CT. Với ý nghĩ đó,chúng tôi đã phát triển phần mềm Smart Tomo Engine. Chúng ta sẽ nói về nó nhiều hơn ở phần sau.
Chúng tôi đã viết về việc triệt tiêu hiện vật chỉnh hướng và ước tính hiệu ứng giác hơi. Trong bài viết này, chúng tôi sẽ viết về một số thử nghiệm được thực hiện bằng cách sử dụng bộ dữ liệu tổng hợp và bộ dữ liệu chụp ảnh thực tế do máy chụp ảnh của Nga thu thập và chứng minh cách phần mềm của chúng tôi hoạt động với bộ xử lý Elbrus thế hệ mới (video được đính kèm bên dưới). Kết quả của chương trình này, chúng ta sẽ thấy được thế giới bên trong của một con bọ may vá và ý nghĩa của “thế giới bên trong” nên được hiểu theo nghĩa đen trong trường hợp này.
Trong bài viết này, chúng tôi sẽ viết về một số thử nghiệm được thực hiện bằng cách sử dụng bộ dữ liệu tổng hợp và bộ dữ liệu chụp ảnh thực tế do máy chụp ảnh của Nga thu thập và chứng minh cách phần mềm của chúng tôi hoạt động với bộ xử lý Elbrus thế hệ mới (video được đính kèm bên dưới).
Kết quả của chương trình này, chúng ta sẽ thấy được thế giới bên trong của một con bọ may vá và ý nghĩa của “thế giới bên trong” nên được hiểu theo nghĩa đen trong trường hợp này.Trong bài viết này, chúng tôi sẽ viết về một số thử nghiệm được thực hiện bằng cách sử dụng bộ dữ liệu tổng hợp và bộ dữ liệu chụp ảnh thực tế do máy chụp ảnh của Nga thu thập và chứng minh cách phần mềm của chúng tôi hoạt động với bộ xử lý Elbrus thế hệ mới (video được đính kèm bên dưới). Kết quả của chương trình này, chúng ta sẽ thấy được thế giới bên trong của một con bọ may vá và ý nghĩa của “thế giới bên trong” nên được hiểu theo nghĩa đen trong trường hợp này.
View attachment 6556180
Roentgenography là một phương pháp chẩn đoán không xâm lấn được sử dụng rộng rãi dựa trên việc tạo ra hình ảnh của một đối tượng bằng cách sử dụng bức xạ tia X. Để có được hình ảnh, vật thể được đặt giữa nguồn tia X và máy dò (xem Hình 1, bên trái). Máy dò có thể là phim nhạy cảm với tia X hoặc máy dò vị trí nhạy cảm. Hình ảnh được tạo ra với sự trợ giúp của bức xạ đi qua một vật thể và bị suy yếu trong quá trình này. Các vật liệu khác nhau làm suy giảm bức xạ tia X một cách khác nhau, điều này cung cấp một số loại tương phản trong hình ảnh. Khi chúng tôi đăng ký bức xạ tia x đi qua một đối tượng, chúng tôi có thể xác định thành phần cục bộ của đối tượng nghiên cứu. Có một ví dụ về chụp X-quang ngực trong Hình 1, bên phải. Các vùng ánh sáng đánh dấu các phần có khả năng hấp thụ cao hơn.Khi chúng ta nhìn vào các xương sườn (các thanh cong nhẹ) giới hạn lồng ngực (khoang tối với các vùng sáng hơn của cây phế quản), ở phía bên phải của phần trên của xương ức (cột sáng ở trung tâm) chúng ta có thể thấy một nốt sáng nhỏ.
View attachment 6556182
Hình 1. Roentgenography: lược đồ cơ bản (bên trái); kết quả roentgenography - một biểu đồ phóng xạ (ở bên phải).
Roentgenography không làm rõ vùng vấn đề nằm sâu như thế nào - ngay trên xương ức, phía trước hay phía sau nó. Thật khó để phân tích cấu trúc không gian tốt của khu vực có vấn đề và xác định hình dạng tổng thể của nó chỉ dựa trên một phép chiếu. Hình 2 minh họa mối quan tâm này.
View attachment 6556184
Hình 2.
Phương pháp CT giúp xác định hình dạng và cấu trúc bên trong. Cũng giống như với kỹ thuật ghi hình học (roentgenography), để thu thập dữ liệu, đối tượng được đặt giữa máy phát tia X và máy dò, nhưng trong trường hợp này, máy ghi lại một tập hợp các tia X được chụp ở các góc độ khác nhau. Các góc quay thường phân bố đều trong một khoảng nhất định. Sơ đồ cơ bản của hoạt động của nó được minh họa trong Hình 3.
View attachment 6556185
Hình 3. Sơ đồ cơ bản của hoạt động chụp cắt lớp
Quá trình thu thập hình ảnh ở các góc độ khác nhau được thực hiện bởi một thiết bị đặc biệt gọi là máy chụp cắt lớp. Vì có thể thu được hình ảnh chụp X-quang của nhiều đối tượng vô tri và vô giác, và các nghiên cứu đang được tiến hành ở cấp vi mô và vĩ mô, nên có rất nhiều loại máy chụp cắt lớp khác nhau. Chúng khác nhau tùy theo kiểu quét (quét tròn từng lớp, quét xoắn ốc, v.v.), loại máy phát tia x được sử dụng, kiểu tạo ra chùm tia thăm dò (hình nón, song song, vi tiêu điểm). Nói một cách khái quát, máy chụp cắt lớp có thể được trình bày như một cỗ máy bao gồm một máy phát bức xạ, một vật giữ vật thể và một máy dò. Bất kỳ bộ phận nào trong số này đều có thể di chuyển được nên có thể thay đổi góc một cách có kiểm soát.Một phần không thể thiếu của máy chụp cắt lớp hiện đại là một máy tính không chỉ quản lý quy trình thu thập hình ảnh X-quang mà còn xử lý dữ liệu thu thập được bằng phần mềm chuyên dụng.
Để có thể phân tích các đối tượng khác nhau, có rất nhiều giải pháp kỹ thuật khác nhau có thể được áp dụng. Ví dụ, khi tiến hành một nghiên cứu y tế, một giàn (một thiết bị chuyển động có chứa cấu trúc nguồn phát tia X và máy dò) (Hình 4) quay xung quanh bệnh nhân đang nằm ở một vị trí cố định. Độ phân giải không gian trong các ảnh chụp cắt lớp này đạt 0,2 - 0,5 mm. Kết quả CT được lưu trữ ở định dạng tệp DICOM, là tiêu chuẩn dành riêng cho ngành y tế được phát triển để tạo, lưu trữ và truyền hình ảnh y tế kỹ thuật số và các tài liệu liên quan của bệnh nhân.
View attachment 6556186
Hình 4. Sơ đồ của một máy chụp cắt lớp y tế
Khi tiến hành nghiên cứu trong ống nghiệm trong phòng thí nghiệm, một chương trình thử nghiệm khác sẽ phù hợp. Trong trường hợp này, nguồn và máy dò là đứng yên, và một tập hợp các hình ảnh tia X được tạo ra bằng cách xoay mẫu. Toàn bộ một bộ vi ảnh tia X trong phòng thí nghiệm đã được xây dựng và đang hoạt động tại Phòng thí nghiệm Đo phản xạ và tán xạ góc thấp của Trung tâm Nghiên cứu Khoa học Liên bang “Tinh thể học và Quang tử” thuộc Viện Hàn lâm Khoa học Nga. Một trong những thiết bị này được thể hiện trong Hình 5. Khi sử dụng máy chụp cắt lớp này, mẫu được đặt trên máy đo góc với trục của nó vuông góc với hướng thăm dò. Thiết bị được trang bị một máy dò hai chiều. Kích thước pixel là 9 micron và trường nhìn của máy dò là 24 x 36 mm.Máy này có thể sử dụng cả bức xạ đa sắc và đơn sắc cho mục đích thăm dò. Điều đó cho phép không chỉ chất lượng cao hơn của hình ảnh được tái tạo mà còn cho phép thu thập dữ liệu bổ sung về thành phần nguyên tố của các đối tượng được nghiên cứu. Việc phát triển các máy chụp cắt lớp của riêng họ giúp có thể truy cập vào dữ liệu thí nghiệm (hình ảnh tia X) và hiệu suất của tất cả các đơn vị của thiết bị, do đó, cho phép tối ưu hóa các giao thức đo phù hợp với mục tiêu.
View attachment 6556187
Hình 5. Hình ảnh một máy chụp cắt lớp trong phòng thí nghiệm tại Trung tâm Nghiên cứu Khoa học Liên bang “Tinh thể học và Quang tử học” thuộc Viện Hàn lâm Khoa học Nga.
Sau khi đăng ký hình ảnh X-quang ở các góc độ khác nhau, tức là tập hợp đầy đủ các phép chiếu, chúng phải được xử lý tiếp theo. Mục tiêu cuối cùng của quá trình xử lý là tái tạo lại cấu trúc hình thái bên trong của vật thể. Khi độ tương phản trong hình ảnh đã đăng ký xảy ra do mỗi vật liệu làm suy giảm bức xạ tia X theo cách riêng của chúng, kết quả tái tạo sẽ là sự phân bố không gian của các hệ số suy giảm của bức xạ thăm dò. Việc mô tả đặc điểm cấu trúc hình thái của các đối tượng được xử lý bằng máy cắt lớp dựa trên sự phân bố không gian nêu trên.
Nếu việc thăm dò được tiến hành bằng chùm tia song song, thì vấn đề tái tạo ba chiều có thể được giải quyết bằng cách khôi phục một tập hợp các mặt cắt ngang hai chiều của một vật thể. Để tái tạo một mặt cắt ngang, không cần sử dụng toàn bộ tập hợp các phép chiếu. Tất cả những gì chúng ta cần chỉ là một dòng của một số cố định từ mỗi góc nhìn. Tất cả các dòng này tương ứng với một mặt cắt ngang của phân phối 3D đang được tái tạo và chúng tôi có thể quy cùng một số cho phân phối này. Trong Hình 6, bên phải, có một hình ảnh được xây dựng từ các đường như vậy. Trục ngang tính số cột dò, trục dọc - cho số góc quay. Kết quả tái tạo mặt cắt ngang được thể hiện trong Hình 6, bên phải.
View attachment 6556188
Hình 6. Hình ảnh chụp X-quang ngực (bên trái); kết quả CT - mặt cắt của hình ảnh 3D (bên phải).
Nếu chúng ta sử dụng bức xạ tia X đơn sắc để thăm dò chụp cắt lớp, thì dựa trên định luật Beer-Lambert-Bouguer, vấn đề tái tạo có thể được rút gọn thành việc thực hiện phép biến đổi Radon.
Phép biến đổi Radon là phép biến đổi tích phân nối giá trị của hàm với các giá trị của tích phân dọc theo mọi đường thẳng có thể. Quy trình áp dụng nó là việc tái tạo một hàm chưa biết bằng cách sử dụng các giá trị đã biết của tích phân của nó dọc theo các đường thẳng. Hàm dưới liên kết cần được tái tạo là sự phân bố của hệ số suy giảm tuyến tính của bức xạ tia X đơn sắc trong toàn bộ mẫu. Tính năng đảo ngược đặc trưng cho phép biến đổi Radon đảm bảo việc tái tạo chính xác hàm giới hạn tần số chưa biết nếu có đủ số lượng tích phân dọc theo các đường thẳng được định vị có hệ thống.Tính năng này sử dụng thuật toán chiếu lùi tích lũy và chiếu lùi đã lọc, được thực hiện trong hầu hết các máy chụp ảnh được sản xuất hàng loạt hiện nay. Nó bao gồm hai bước. Bước đầu tiên là lọc tuyến tính các hình ảnh đã đăng ký. Bước thứ hai là phép chiếu nghịch đảo, tức là thậm chí “làm nhòe” từng hàm một chiều được tạo ra ở giai đoạn trước theo hướng thích hợp trên toàn bộ hình ảnh hai chiều với tổng sau đó. Kết quả của hiệu suất thuật toán là sự phân bố không gian được tái tạo lại của hệ số suy giảm tuyến tính của bức xạ tia X của một năng lượng nhất định. Nếu việc thăm dò được thực hiện không sử dụng chùm song song mà là chùm hình nón, thì việc tái tạo từng lớp sẽ không thể thực hiện được và việc sử dụng các thuật toán phức tạp hơn là cần thiết.Chúng tôi sẽ xem xét các thuật toán tái tạo ba chiều, chẳng hạn như thuật toán của Feldkamp, vào một thời điểm khác. Bây giờ, chúng ta hãy bắt đầu cuộc trò chuyện về phần mềm của chúng tôi.
Công cụ Tomo thông minh
Cốt lõi của Smart Tomo Engine là một thư viện tái tạo hình ảnh chụp cắt lớp thực hiện các chức năng sau thông qua API: đọc hình ảnh chụp cắt lớp (chiếu), bản thân việc tái tạo hình ảnh chụp cắt lớp (có ba thuật toán để lựa chọn ở đây) và lưu trữ kết quả (sử dụng định dạng tệp đề xuất: DICOM, PNG). Sản phẩm phần mềm cũng bao gồm giao diện người dùng đồ họa cho phép hiển thị hai chiều hình ảnh chụp cắt lớp và kết quả tái tạo. Chức năng chính của sản phẩm phần mềm là thực hiện tái tạo hình ảnh kỹ thuật số ba chiều của một đối tượng bằng cách sử dụng một tập hợp các hình ảnh chụp cắt lớp truyền dẫn của nó trong dải x-quang.
Các thuật toán sau được triển khai để tái tạo hai chiều theo từng lớp:
FBP - Chiếu ngược được lọc. Phương pháp tái tạo chụp cắt lớp cổ điển kết hợp phép chiếu nghịch đảo và lọc tuyến tính. Độ phức tạp tính toán là $ O (n ^ 3) $. Bạn có thể tìm hiểu thêm về phương pháp này tại đây [2].
FR - Tái tạo Fourier trực tiếp. Thuật toán này hoạt động trong miền tần số và sử dụng Biến đổi Fourier Nhanh (FFT) để lọc và phép chiếu nghịch đảo. Độ phức tạp tính toán của các phép nhân là $ O (n ^ 2 \ log n) $.
HFBP - Hough FBP. Đó là một thuật toán tái tạo được phát triển bởi các nhà khoa học của chúng tôi. Thuật toán Brady cho Biến đổi Hough nhanh được sử dụng cho phép chiếu ngược và phương pháp Deriche được sử dụng để tăng tốc lọc tuyến tính [4,5].
Thử nghiệm trên nền tảng Elbrus
Chúng tôi đã thử nghiệm phần mềm của mình bằng nền tảng do Nga sản xuất. Thử nghiệm được thực hiện trên các máy tính Elbrus-401, Elbrus-804 và Elbrus-801CB. Elbrus-401 là máy tính trạm sử dụng bộ vi xử lý Elbrus-4C, Elbrus-804 là máy chủ có 4 bộ vi xử lý Elbrus-8C. (Chúng tôi đã thử nghiệm một phần mềm khác do chúng tôi phát triển trên những máy tính này. Elbrus-801CB là sự phát triển mới nhất của MCST: đó là một máy tính trạm sử dụng bộ xử lý Elbrus-8CB. Các đồng nghiệp của chúng tôi từ Trung tâm Công nghệ SPARC Moscow (MCST) đã nói chuyện với chúng tôi về sự khác biệt chính của máy tính Elbrus thuộc một số thế hệ: "Elbrus-4c là bộ vi xử lý đầu tiên được sản xuất hàng loạt cho thị trường. Đó là bộ vi xử lý 4 nhân với tốc độ xung nhịp 750 ... 800 MHz và 3 DDR3- 1600 kênh cho giao tiếp giữa các bộ xử lý.Elbrus-8C là bộ vi xử lý 8 lõi với tốc độ xung nhịp 1,2… 1,3 Ghz và với 4 bộ bộ nhớ kênh DDR3-1600 và mỗi lõi có gấp 1,5 lần đơn vị logic số học (ALU) để có hiệu suất dấu chấm động cao hơn. Elbrus-8CB là một cải tiến hơn nữa: đó là bộ vi xử lý 8 lõi với tốc độ xung nhịp 1,5 Ghz và bộ nhớ kênh DDR4-2400 và với số lượng ALU gấp 2 lần. Elbrus-8CB hoạt động tốt hơn với dữ liệu không liên quan và nó có rất nhiều cải tiến nhỏ khác so với Elbrus-8C.
Đặc điểm của các bộ xử lý được trình bày trong Bảng 1.
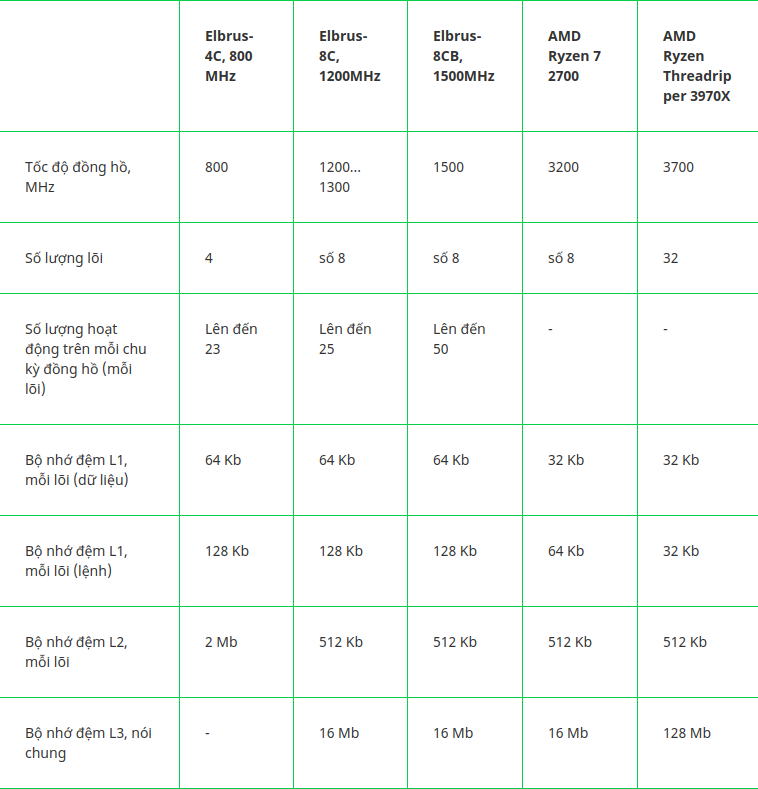
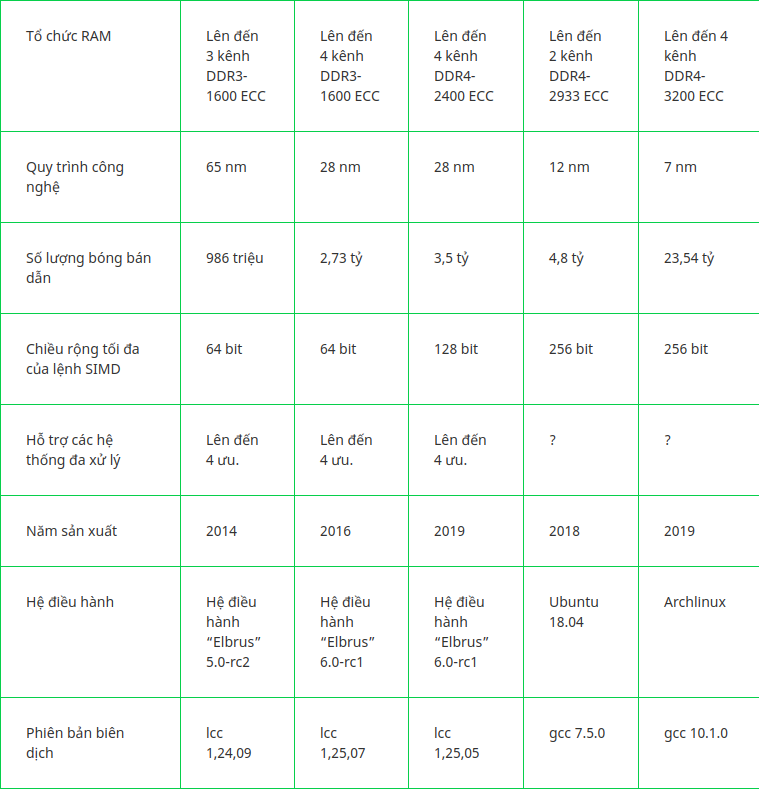
Chúng tôi đã viết về cách tối ưu hóa cho nền tảng điện toán Elbrus, vì vậy chúng tôi sẽ không trình bày chi tiết về chủ đề này bây giờ. Chúng tôi chưa làm được điều gì phi thường ở đây: Chúng tôi đã sử dụng thư viện EML được tối ưu hóa (các phép biến đổi hình học của một hình ảnh (ví dụ, các phép biến đổi affine), các phép toán số học, v.v.);
—Chúng tôi đã sử dụng thư viện EML được tối ưu hóa (các phép biến đổi hình học của một hình ảnh (ví dụ, các phép biến đổi affine), các phép toán số học, v.v.);
—Chúng tôi đã sử dụng bản chất khi thư viện EML không hoạt động; tuy nhiên, SIMD trên Elbrus-8CB đã được nâng cấp lên 128 bit và chúng tôi vẫn chưa quản lý để áp dụng đầy đủ nó trong nghiên cứu của mình, đó là lý do tại sao bản chất vẫn hoạt động với các vectơ 64 bit.
Để kiểm tra phần mềm Smart Tomo Engine, chúng tôi đã thu thập hai tập dữ liệu: một tập dữ liệu tổng hợp và một tập dữ liệu thực tế. Tập dữ liệu tổng hợp “Shepp-Logan 3D” được tạo bằng cách sử dụng phương pháp mô hình hóa toán học. Các phép chiếu được tính toán từng lớp trên ảo ảnh 3D Shepp-Logan bằng cách sử dụng phương pháp đẩy chổi. Mặt cắt ngang được thể hiện trong Hình 8, bên trái. Kích thước của hình ảnh ảo là 511х511х511. Các phép chiếu được tính toán cho 420 góc khác nhau, phân bố đều giữa 0,5 và 210 độ. Đã có 511 sinogram với kích thước 511-420 được xem xét ở đầu vào của thử nghiệm của chúng tôi với phần mềm Smart Tomo Engine (một trong số chúng được hiển thị trong Hình 7, bên phải). Và có 511 lớp được tái tạo ở đầu ra, với kích thước là 511х511.Kích thước của hình ảnh ảo bằng kích thước của hình ảnh được tạo ra bởi các máy chụp cắt lớp răng hiện nay: kích thước tối đa của vùng quét trong miệng thường là 16 cm, độ phân giải không gian được các nhà sản xuất công bố là 0,3 - 0,4 mm . Trong trường hợp này, kích thước của phép chiếu đã đăng ký sẽ là khoảng 500х500 pixel.
View attachment 6556193
Hình 7. Bên trái - mặt cắt của bóng ma 3D Shepp-Logan, bên phải - hình ảnh sinogram của lớp trung tâm.
Dữ liệu chụp cắt lớp thực tế (tập dữ liệu “Maybug”) được thu thập bằng máy vi phẫu thuật tại Trung tâm Nghiên cứu Khoa học Liên bang “Tinh thể học và Quang tử học” thuộc Viện Hàn lâm Khoa học Nga. Và dữ liệu này được sử dụng cho mục đích nghiên cứu khoa học. Kích thước pixel của máy dò được sử dụng là 9 micron. Mẫu thử nghiệm là một con bọ xít khô. Có 400 phép chiếu được thực hiện trong mạng song song. Mẫu, được đặt trong giá đỡ, đang quay các góc trong phạm vi từ 0,5 đến 200 độ, tăng dần 0,5 độ. Kích thước của hình chiếu được sản xuất là 1261х1175. Đầu vào cho chương trình Smart Tomo Engine là 1261 sinogram với kích thước 1175х400, đầu ra là 1261 lớp được tái tạo với kích thước 1175х1175.
Và đây là phần tốt nhất - kết quả kiểm tra và kết luận
Chúng tôi đã đo tốc độ thực thi của các thuật toán tái tạo mà chúng tôi đã sử dụng: FBP, DFR và HFBP. Thời gian hoạt động của các thuật toán được thể hiện trong Bảng 2. Các phép đo được tiến hành trên 5 máy tính: Elbrus-401, Elbrus-804, Elbrus-801CB, AMD Ryzen 7 2700 và AMD Ryzen Threadripper 3970X. Chúng tôi đã bao gồm thông tin về số bộ xử lý, số lõi vật lý và số luồng chạy tối đa (được chỉ ra trong ngoặc đơn) cho mỗi máy tính. Các phép đo tốc độ tái tạo được tiến hành ở hai chế độ khác nhau: ở chế độ đơn luồng (SM) và chế độ đa luồng (MM). Và chúng đã được triển khai bằng cách sử dụng phiên bản "2017 update 7" của thư viện tbb.
Bảng 2. Các phép đo thời gian hoạt động của chương trình, giây.
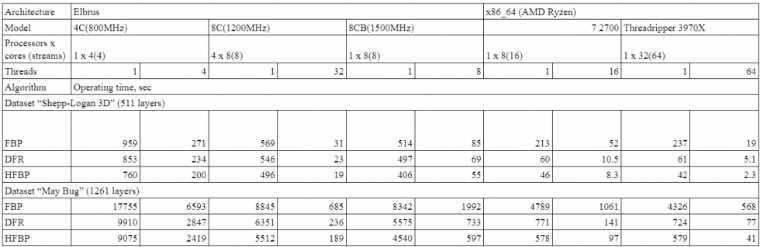
Khi phân tích kết quả thử nghiệm, trước hết, chúng tôi muốn đề cập rằng để tái tạo lại 511 lớp bóng ma, máy chủ Elbrus-804 với 4 bộ xử lý phải mất 19 giây khi sử dụng thuật toán HFBP. Điều này có nghĩa là mỗi lớp được tái tạo trong 0,037 giây và tần số từng lớp là 26,8 ips. Để tìm hiểu xem đó là tần số cao hay thấp, chúng ta có thể sử dụng tài liệu tham khảo sau. Giàn của một máy chụp cắt lớp tim 16 mặt cắt quay toàn bộ vòng tròn gần như hai lần mỗi giây và ghi lại khoảng 30 sinogram. Chúng tôi tái tạo 26,8 lớp mỗi giây, tức là nó thực tế là một quá trình tái tạo theo thời gian thực. Vì vậy, chúng tôi có thể kết luận rằng khi sử dụng nền tảng của Nga, việc tái tạo đáp ứng các yêu cầu về thời gian hoạt động trong tim mạch, trong đó tham số tham chiếu chính là tần số của nhịp tim,trung bình, bằng một giây.
Việc tái tạo theo thời gian thực cũng được sử dụng để thực hiện giao thức quét mới được các nhà khoa học của chúng tôi đề xuất gần đây - tái tạo được giám sát [6]. Khi quy trình này được sử dụng, có thể giảm mức phơi nhiễm bức xạ do việc thu thập hình ảnh X quang sẽ dừng lại ngay sau khi có một bộ thích hợp cho việc tái tạo.
Không có hạn chế nghiêm trọng về thời gian khi nghiên cứu khoa học, nhưng có một số yêu cầu nhất định đối với độ phân giải không gian. Vì lý do này, các mặt cắt được tái tạo lớn hơn. Khi chúng tôi làm việc với tập dữ liệu được tạo bởi máy ảnh vi mô trong phòng thí nghiệm, mất 189 giây để tái tạo lại 1261 lớp ở chế độ đa luồng (6,7 ips). Việc đo dữ liệu đầu vào với sự trợ giúp của máy chụp cắt lớp trong phòng thí nghiệm mất 2000 giây, trong khi chương trình Smart Tomo Engine chạy trên Elbrus-804 chỉ mất 3 phút và một số thay đổi để tái tạo lại tất cả các lớp, chiếm 10% so với trước đó kết quả. Máy chủ 4 bộ xử lý với bộ vi xử lý Elbrus-8CB sẽ hoạt động nhanh hơn nữa. Nó đã được phát triển tại MSCT và việc sản xuất hàng loạt hiện đang trong giai đoạn lập kế hoạch.
Mối quan hệ giữa hiệu suất của các nền tảng khác nhau bằng cách sử dụng mỗi thuật toán cũng rất thú vị. Khi sử dụng FBP, chi phí của Elbrus là vừa phải và khi tốc độ đồng hồ được bình thường hóa, kết quả là khá gần. Nhưng khi sử dụng DFR và HFBP, chi phí Elbrus so với nền tảng x86 cao hơn nhiều. Tại sao vậy? Điều này xảy ra do phần mềm của chúng tôi không được tối ưu hóa đầy đủ cho nền tảng Elbrus. Chúng tôi đã dành 5 năm để giải quyết các vấn đề tối ưu hóa cho nền tảng x86-64 và chúng tôi vẫn chưa tối ưu hóa hầu hết các chương trình và thuật toán cho nền tảng Elbrus, cụ thể là Elbrus-8CB.
Trong tương lai gần, chúng tôi đang lên kế hoạch cải tiến theo ba hướng. Cách đầu tiên là tối ưu hóa các tính toán của chúng tôi khi sử dụng bản chất. Hiện tại, các tính toán của chúng tôi được thực hiện cho SIMD 64 bit, nhưng Elbrus-8CB có SIMD 128 bit. Cải tiến thứ hai sẽ được thực hiện bởi nhóm MCST. Đã có những phát triển đang được tiến hành hỗ trợ phép biến đổi Fourier rời rạc hai chiều và một chiều cho vectơ đầu vào không phải là lũy thừa của hai. Vì nó chưa sẵn sàng, chúng tôi đã sử dụng thư viện ffts với một chút tinh chỉnh được thực hiện cho cả nền tảng Elbrus và nền tảng x86.
Để đánh giá khả năng tăng tốc của chương trình, chúng tôi đã đo thời gian hoạt động của biến đổi Fourier rời rạc được thực hiện trên bộ xử lý Elbrus-8CB cho ma trận phức hợp đầu vào có kích thước 512 x 512. Thư viện ffts không được tối ưu hóa cho Elbrus đã thực hiện điều này hoạt động trong 27 mili giây và thư viện EML thực hiện thao tác tương tự chỉ trong 5,5 mili giây. Chúng tôi đã tăng tốc thư viện ffts bằng cách gọi đến thư viện EML. Các phép đo trong Bảng 2 được thực hiện sau khi tối ưu hóa này. Chúng tôi có thể đưa ra kết luận rằng nếu tối ưu hóa được thực hiện kỹ lưỡng như thư viện tệp eml được thực hiện, thì thuật toán DFR trên nền tảng Elbrus vẫn có thể được tăng tốc 2,5 lần.
Và cuối cùng nhưng không kém phần quan trọng là cải tiến liên quan đến thuật toán HFBP dựa trên việc sử dụng phép biến đổi Hough. Biến đổi này chưa được trình bày trong thư viện EML và phiên bản của chúng tôi chỉ được tối ưu hóa với sự trợ giúp của các phép toán vectơ. Vì thuật toán này hiệu quả hơn về mặt tính toán so với DFT (kết luận lý thuyết của chúng tôi và phiên bản được tối ưu hóa cho nền tảng x86_64 chứng minh điều đó), nên nó cũng có thể được tăng tốc thêm vài lần. Chúng tôi chắc chắn sẽ nói về kết quả của những tối ưu hóa này vào lần tới.
Đây là video hứa hẹn về màn trình diễn của chương trình trên Elbrus-8CB.
Smart Tomo Engine - work of the program on the Elbrus-8SV processor
Smart Tomo Engine - работа программы на процессоре Эльбрус-8СВ
Ở đây, hãy xem thế giới bên trong của một con bọ may vá (maybug ) trông như thế nào.
Smart Tomo Engine - томографическая реконструкция майского жука
Phần kết luận
Trong bài viết này, chúng tôi đã giới thiệu sản phẩm mới của mình - phần mềm để tái tạo hình ảnh chụp cắt lớp có tên là Smart Tomo Engine:
—Bao gồm thuật toán cải tiến HFBP luôn hoạt động tốt hơn thuật toán DFR, thuật toán dẫn đầu trong quá khứ;
—Hỗ trợ các hệ điều hành: OS Elbrus, MS Windows, macOS, các bản phân phối Linux khác nhau;
—Hỗ trợ các kiến trúc bộ xử lý sau: Elbrus, x86, x86_64;
—Là một sự phát triển độc quyền của Nga;
—Là một phần của phức hợp phần mềm và phần cứng của nền tảng Elbrus, nó có thể được sử dụng bởi bất kỳ máy quét y tế hoặc công nghiệp thuộc bất kỳ thế hệ nào, bằng các máy chụp cắt lớp nano mới nhất (các thiết bị tái tạo lại các đối tượng với độ phân giải submicron) và các cơ sở đồng bộ hóa như ổn.
Nhưng kết quả chính của bài viết này là sự kết hợp của bộ xử lý Elbrus do Nga sản xuất và chương trình Smart Tomo Engine là đủ cho việc chụp cắt lớp thời gian thực, ngay cả khi không có các cải tiến bổ sung đang được phát triển!
PS Chúng tôi không thể cưỡng lại và đo hiệu suất UNet trên nền tảng Elbrus. UNet là một kiến trúc mạng nơ-ron (neural network) nổi tiếng được sử dụng để giải quyết các vấn đề về phân đoạn. Ban đầu, UNet được thiết kế để giải quyết các vấn đề về phân đoạn trong lĩnh vực y tế, và bây giờ các hình ảnh chụp cắt lớp được xử lý bằng phương pháp mạng thần kinh này được sử dụng để xác định bệnh lý và khối u. Các phần phức tạp về mặt tính toán của mạng nơ-ron được thực hiện thông qua thư viện EML và thư viện EML được tối ưu hóa cho các thế hệ khác nhau của nền tảng Elbrus. Đó là lý do tại sao việc đánh giá hiệu suất thực tế của các bộ vi xử lý khác nhau bằng cách sử dụng các phép đo này trở nên dễ dàng hơn. Các phép đo được thực hiện cho một lõi, không có song song. Bằng cách đó không cần quan tâm đến số lượng lõi.
View attachment 6556204
Hãy nhìn vào hai số cuối cùng. Làm thế nào gọn gàng là vậy? Và nghiên cứu của chúng tôi đang tiếp tục…
Tham khảo
[1] https://en.wikipedia.org/wiki/History_of_computed_tomography
[2] AC Kak, M. Slaney, G. Wang. “Các nguyên tắc của hình ảnh chụp cắt lớp vi tính”, Vật lý Y tế, 2002, tập. 29, №1, trang 107-107.
[3] F. Natterer. “Tái tạo Fourier trong chụp cắt lớp”, Numerische Mathematik, 1985, vol. 47, №3, trang 343-353.
[4] A. Dolmatova, M. Chukalina và D. Nikolaev. “Fbp tăng tốc để tái tạo hình ảnh chụp cắt lớp điện toán”, IEEE ICIP 2020, Washington, DC, United States, IEEE Computer Society, 2020, sẽ được xuất bản.
[5] А. В. Долматова, Д. П. Николаев. “Ускорение свертки и обратного проецирования при реконструкции томографических итнображененсы, 2020, ений”, С 34, №1, c. 64-71, doi: 10.31857 / S0235009220010072.
[6] K. Bulatov, M. Chukalina, A. Buzmakov, D. Nikolaev và VV Arlazarov, “Monitored Reconstruction: Computed Tomography as an Anytime Algorithm”, IEEE Access, 2020, vol. 8, trang 110759-110774, doi: 10.1109 / ACCESS.2020.3002019.
Quay lại công ty trí tuệ nhân tạo Smart Engines đươc nói quá nhiều từ vol trước đến vol này, và vừa được nói ở cách đây vài post xong. Họ không chỉ phát triển các sản phẩm trí tuệ nhân tạo AI để nhận dạng tài liệuTại sao chỉ thử phần mềm trên Elbrus và AMD, mà không thử trên Intel hả?
Một máy chụp cắt lớp thời gian thực đã được tạo ra tại Elbrus và phần mềm trong nước
Trong công ty Smart Engines của Nga, tổ hợp phần mềm Smart Tomo Engine do họ phát triển để tái tạo hình ảnh chụp X-quang trong thời gian thực đã tham gia thử nghiệm so sánh, được thực hiện trên các hệ thống với nhiều bộ xử lý khác nhau của Nga thuộc dòng Elbrus của công ty MCST, bao gồm cả Elbrus- 8СВ "và chip AMD hiện đại với kiến trúc x86-64.
Như kết quả thử nghiệm cho thấy, các bộ vi xử lý trong nước có đủ hiệu suất để giải quyết các vấn đề chụp cắt lớp trong thời gian thực. Kết quả thử nghiệm cũng xác nhận rằng công nghệ Smart Tomo Engine hoàn toàn trong nước của công ty Smart Engines của Nga phù hợp để sử dụng trong các hệ thống phần cứng và phần mềm trên nền tảng Elbrus cho các máy quét y tế và công nghiệp thuộc mọi thế hệ, cũng như cho các máy chụp cắt lớp nano và trung tâm đồng bộ hóa độ phân giải submicron mới nhất. ...
“Theo phân loại của châu Âu về mức độ sẵn sàng công nghệ, nó có thể được đánh giá là TRL7,” Vladimir Arlazarov, Ph.D., CEO của Smart Engines cho biết. “Điều này có nghĩa là hệ thống của chúng tôi đã cho thấy khả năng hoạt động và hiệu quả cùng với một máy chụp cắt lớp thực sự đang hoạt động, trên một máy tính được sản xuất. Phần mềm chúng tôi đã phát triển là một sản phẩm sẵn sàng sử dụng có thể được tích hợp cả ở giai đoạn phát triển của các máy chụp cắt lớp mới về cơ bản và thích ứng với các mẫu đã được vận hành. "
Chụp X quang chụp X quang hiện đại
Chẩn đoán không xâm lấn dựa trên chụp X quang cắt lớp vi tính (CT) cho phép bạn tạo hình ảnh về hình dạng và cấu trúc bên trong của các vật thể sống và vô tri bằng tia X. Để hình thành cấu trúc thể tích của một hình ảnh, CT X-quang sử dụng các bức ảnh chụp X quang ở các góc độ khác nhau. Một tập hợp các hình chiếu trải qua quá trình xử lý đặc biệt - tái tạo, do đó cấu trúc hình thái bên trong của đối tượng được tái tạo.
View attachment 5680252
Máy ảnh vi mô thực nghiệm của FNITs KF RAS
Smart Engines giải thích với CNews rằng nền tảng phần mềm Smart Tomo Engine cung cấp khả năng tái tạo hình ảnh kỹ thuật số ba chiều của một vật thể dựa trên tập hợp các hình ảnh chụp cắt lớp truyền dẫn của nó trong phạm vi tia X.
Nền tảng này dựa trên một thư viện đặc biệt về tái tạo chụp cắt lớp, thông qua API cung cấp các chức năng để đọc các phép chiếu chụp cắt lớp, tái tạo hình chụp cắt lớp trực tiếp bằng cách sử dụng một trong ba thuật toán, cũng như lưu kết quả ở định dạng DICOM y tế hoặc PNG thông thường. Phần mềm này cũng bao gồm một giao diện đồ họa để hiển thị 2D các hình ảnh chụp cắt lớp và kết quả tái tạo.
View attachment 5680263
Smart Tomo Engine GUI
Để tái tạo hai chiều từng lớp, thuật toán FBP (Filtered Back Projection) cổ điển với phép chiếu ngược và lọc tuyến tính, tần số DFR (Direct Fourier Reconstruction) với việc sử dụng biến đổi Fourier nhanh để lọc và chiếu ngược, cũng như HFBP trong nước (Hough FBP), trong đó ngược lại Đối với phép chiếu, thuật toán Brady để tính toán nhanh biến đổi Hough được sử dụng và phương pháp Derish được sử dụng để tăng tốc độ lọc tuyến tính.
Smart Engines giải thích với CNews rằng nhu cầu chụp X quang điện toán là rất cao. Hiện tại, khoảng 2.000 đơn vị CT y tế đã được lắp đặt ở Nga, con số này ít hơn đáng kể trên mỗi bệnh nhân trên quy mô toàn cầu, trong khi số lượng cung cấp khoảng 100 thiết bị hàng năm và khối lượng đang giảm trong điều kiện hạn chế.
Đối với nhu cầu về các thiết bị chụp X quang cắt lớp vi tính trong công nghiệp, chúng ta có thể nói đến hàng chục nghìn, vì việc sử dụng các hệ thống này đã tăng lên gấp nhiều lần cả trong lĩnh vực kiểm tra không phá hủy các sản phẩm trong công nghiệp và trong lĩnh vực an ninh vận tải (các tổ hợp kiểm tra trong vận tải, hải quan , v.v. . ).
Về khả năng cạnh tranh của việc phát triển Smart Engines trên thị trường thế giới, công ty đã giải thích với CNews như sau. Mỗi nhà sản xuất máy quét CT đều sử dụng một số dạng phần mềm tái tạo hình ảnh và có một thị trường B2B ở nơi này. Ưu điểm của việc phát triển Smart Engines là tốc độ hoạt động cao hơn do các thuật toán hiệu suất cao mới về cơ bản, tăng độ phân giải thực của hình ảnh thu được do các mô hình hình thành tín hiệu chính xác hơn, cũng như khả năng giảm liều thông qua việc sử dụng các kỹ thuật tái tạo được giám sát. Công ty nhấn mạnh việc giảm phơi nhiễm bức xạ của một bệnh nhân trong điều kiện phải chụp CT nhiều lần để theo dõi tình trạng của các cơ quan nội tạng là một yếu tố rất quan trọng, đặc biệt là trong một đại dịch.
Công ty nói với CNews, chiến lược Smart Engines chưa bao gồm kế hoạch đưa phần mềm này ra thị trường nước ngoài: trong điều kiện hiện tại, cần phải đưa phần mềm ra thị trường như một phần của tổ hợp phần mềm và phần cứng.
“Trong trường hợp của chúng tôi, chúng tôi chứng minh rằng hệ thống phần mềm mà chúng tôi đã tạo ra có khả năng hoạt động không chỉ trên các nền tảng máy tính thông dụng phổ biến mà còn trên các hệ thống do Nga sản xuất, đồng thời thể hiện chất lượng cao và tốc độ làm việc đủ cho nghiên cứu,” ông Vladimir Arlazarov nói. - Đối với nước ta, điều này trước hết là quan trọng vì nó có thể tạo ra một tổ hợp phần mềm và phần cứng hoàn toàn trong nước cho CT ở Nga. Tuy nhiên, theo giấy phép học thuật, chúng tôi cũng có kế hoạch cung cấp phần mềm của mình cho các trung tâm synctron hàng đầu thế giới. "
Làm thế nào và những gì đã được thử nghiệm
Các thử nghiệm của phần mềm nội địa Smart Tomo Engine được thực hiện bởi các nhân viên của công ty Smart Engines với sự hợp tác của các nhà khoa học thuộc Viện Hàn lâm Khoa học Nga (IITP RAS và FRC IU RAS) và các kỹ sư của công ty MCST, một nhà sản xuất bộ vi xử lý Elbrus.
Phần mềm Smart Tomo Engine chạy trên hệ điều hành Nga Elbrus, Microsoft Windows , Apple macOS và các bản phân phối Linux khác nhau , đồng thời cũng tương thích với các kiến trúc bộ xử lý khác nhau, bao gồm kiến trúc Elbrus VLIW và kiến trúc x86 x86-64.
Quá trình tái tạo thử nghiệm được thực hiện trên dữ liệu tổng hợp và hình ảnh thực thu được bằng cách quay phim bọ May trên máy ảnh vi mô của Trung tâm Nghiên cứu Liên bang của KF RAS. Tập dữ liệu tổng hợp "Shepp-Logan 3D" thu được bằng cách lập mô hình toán học sử dụng lược đồ hình quạt và tính toán từng lớp của phép chiếu từ bóng ma Shepp-Logan ba chiều. Kích thước hình chiếu là 511 × 51 pixel.
View attachment 5680265
Tia X thể tích của bọ tháng năm
Dữ liệu chụp ảnh thực tế từ bộ dữ liệu của Bọ cánh cứng tháng 5 được thu thập trên một bức ảnh vi mô của Trung tâm Nghiên cứu Liên bang của KF RAS. Kích thước pixel của máy dò được sử dụng là 9 micron và một con bọ khô được sử dụng làm mẫu. Kích thước hình chiếu là 1175 × 1175 pixel.
Các phép đo tốc độ của thuật toán tái tạo được thực hiện ở chế độ đơn luồng (1P) và đa luồng (MP) trên năm hệ thống máy tính: máy trạm Elbrus-401 (bộ xử lý Elbrus-4C), máy chủ Elbrus-804 với bốn Elbrus- 8С ", máy trạm" Elbrus-801SV "với bộ xử lý mới nhất" Elbrus-8SV ", cũng như các hệ thống dựa trên bộ xử lý AMD Ryzen 7 2700 và AMD Ryzen Threadripper 3970X.
Bộ xử lý Elbrus-8SV mới nhất rất thú vị với sự hiện diện của tám lõi với tần số 1,5 GHz, hỗ trợ RAM DDR4-2400 (lần đầu tiên cho bộ xử lý MCST), cũng như hai lõi với số lượng ALU tăng lên.
View attachment 5680266
Bộ xử lý Elbrus-8SV
Konstantin Trushkin , phó tổng giám đốc tiếp thị tại MCST cho biết: “Elbrus-8SV hoạt động tốt hơn với dữ liệu không được căn chỉnh và nó có nhiều cải tiến nhỏ khác so với Elbrus-8S .
Kết quả kiểm tra
Phân tích kết quả cho thấy ở chế độ đa luồng, máy chủ Elbrus-804 4 bộ xử lý mất 19 giây để tái tạo lại 511 lớp ảo bằng thuật toán HFBP (0,037 giây mỗi lớp), tần số từng lớp là 26,8 lớp mỗi giây (26,8 ips) , trên thực tế có nghĩa là tiến hành tái tạo gần như trong thời gian thực. Việc tái tạo 1261 lớp của bộ dữ liệu May Beetle mất 189 giây (6,7 ips) ở chế độ đa luồng.
Đo thời gian hoạt động của Smart Tomo Engine với các bộ xử lý khác nhau
Việc tái tạo bằng nền tảng của Nga đáp ứng các yêu cầu về tốc độ trong tim mạch, trong đó thông số tham chiếu chính là thời gian tim co lại, trung bình là một giây, CNews giải thích trên Smart Engines.
CPU Elbrus 4C, 800 MHz Elbrus 8C, 1,2 GHz Elbrus 8SV, 1,5 GHz AMD Ryzen 7 2700 AMD Ryzen 3970X (Bộ xử lý luồng) Hệ thống 1 CPU x 4 lõi / 4 luồng 4 CPU x 8 lõi / 8 luồng 1 CPU x 8 lõi / 8 luồng 1 CPU x 8 lõi / 16 luồng 1 x 32 (64) Chế độ 1P 4P 1P 32P 1P 8P 1P 16P 1P 64P Shepp-Logan 3D (511 lớp) FBP 959 giây 271 giây 569 giây 31 giây 514 giây 85 giây 213 giây 52 giây 237 giây 19 giây DFR 853 giây 234 giây 546 giây 23 giây 497 giây 69 giây 60 giây 10,5 giây 61 giây 5,1 giây HFBP 760 giây 200 giây 496 giây 19 giây 406 giây 55 giây 46 giây 8,3 giây 42 giây 2,3 giây "Con bọ có thể" (lớp 1261) FBP 17755 giây 6593 giây 8845 giây 685 giây 8342 giây 1992 s 4789 giây 1061 giây 4326 giây 568 giây DFR 9910 giây 2847 giây 6351 giây 236 giây 5575 giây 733 giây 771 giây 141 giây 724 giây 77 giây HFBP 9075 giây 2419 giây 5512 giây 189 giây 4540 giây 597 578 giây 97 giây 579 giây 41 giây
Khi làm việc với thuật toán FBP, độ trễ của Elbrus ở mức vừa phải, khi chuẩn hóa với tần số xung nhịp cho kết quả tương tự, nhưng với thuật toán DFR và HFBP, độ trễ của Elbrus lớn hơn.
Về vấn đề này, Smart Engines tuyên bố rằng phần mềm Smart Tomo Engine chưa được tối ưu hóa đầy đủ cho nền tảng Elbrus. Công ty cho biết phải mất năm năm để tối ưu hóa phần mềm cho nền tảng x86-64, đối với Elbrus, đặc biệt là đối với Elbrus-8SV mới nhất, quá trình tối ưu hóa hầu hết các chương trình và thuật toán mới bắt đầu và quá trình này sẽ mất khoảng hai tháng.
Trong tương lai gần, công ty có kế hoạch tối ưu hóa các tính toán để song song hóa SIMD 128-bit của bộ xử lý Elbrus-8SV và tăng tốc nền tảng bằng thuật toán HFBP - ít nhất là vài lần.

Создан томограф реального времени на «Эльбрусах» и отечественном ПО. Видео
Первые тестирования ПО Smart Tomo Engine для томографической реконструкции на системе с «Эльбрус-СВ» показали, что сочетания...www.cnews.ru
Sản phẩm Smart Tomo Engine của họ (2 đoạn trích trên từ vol 3 và 6) dùng để tái tạo hình ảnh chụp cắt lớp (tomographic reconstruction), cũng đã kiểm thử và chạy tốt trên các máy chủ (server), máy trạm (workstation), etc với dòng chip CPU Elbrus của Nga và AMD
Các nhà khoa học Italy và Nga đã hợp tác để tạo ra một hệ thống mới để xử lý tự động dữ liệu chụp cắt lớp (automatic processing of tomographic data)
Viện Công nghệ nano CNR-Nanotec của Ý đã ký kết thỏa thuận hợp tác 3 năm với công ty khoa học Nga Smart Engines để thực hiện dự án tạo ra một hệ thống tự động mới để tái tạo hình ảnh chụp cắt lớp.
Smart Engines, một công ty nghiên cứu và phát triển chuyên về phát triển thị giác máy tính, máy học và thuật toán AI, và Viện CNR về Công nghệ nano của Hội đồng Nghiên cứu Quốc gia Ý (CNR-Nanotec) đã ký kết một thỏa thuận hợp tác kéo dài 3 năm. Mục tiêu của nó là chia sẻ kinh nghiệm trong việc phát triển các thuật toán tái tạo hình chụp cắt lớp trong việc đánh giá hiệu quả của các phương pháp điều trị tiên tiến và nghiên cứu các bệnh lý về thần kinh. Nhóm khoa học chung đã bắt đầu thực hiện các dự án sử dụng công nghệ mạng nơ-ron để làm việc với hình ảnh chụp cắt lớp tương phản theo pha.
Smart Tomo Engine - blackberry 3D reconstruction
Trong khuôn khổ của hành động đã ký, dự kiến sẽ tổ chức một cuộc trao đổi kinh nghiệm học thuật và khoa học, cũng như trao đổi sinh viên và nhà khoa học, phát triển một dự án chung trong lĩnh vực phát triển các phương pháp chụp cắt lớp X-quang và kính hiển vi để được hỗ trợ trong khuôn khổ các chương trình nghiên cứu quốc gia và quốc tế.
Các nhà nghiên cứu của nhóm người Ý có nhiều năm chuyên môn trong việc thực hiện các phép đo độc đáo về các nguồn bức xạ synctron trên thế giới và kiến thức lý thuyết cần thiết để xây dựng các mô hình toán học mô tả quá trình hình ảnh. Các nhà khoa học của Smart Engines có thể tạo ra các mô hình mạng lưới thần kinh tiết kiệm năng lượng có thể giảm liều bức xạ cho bệnh nhân trong quá trình nghiên cứu y tế bằng cách sử dụng chụp cắt lớp X-quang. Việc giảm tải liều lượng là hạn chế đối với việc sử dụng các hệ thống máy tính y tế hiện có và là nơi tập trung nỗ lực của các nhóm khoa học liên ngành nhằm tạo ra các hệ thống mới để xử lý tự động dữ liệu chụp cắt lớp có độ phân giải cao.
“Đối với Smart Engines, sự hợp tác với trường đại học công nghệ nano hàng đầu của Ý là cơ hội tuyệt vời để tăng số lượng thành tựu khoa học trong lĩnh vực chụp cắt lớp vi tính. Về phần mình, chúng tôi cung cấp các kiến trúc mạng thần kinh của riêng mình, việc sử dụng kiến trúc này cho phép chúng tôi giảm liều bức xạ cần thiết cho bệnh nhân trong quá trình chụp cắt lớp vi tính bằng tia X. Và tất nhiên, điều quan trọng cần lưu ý là sự tương tác giữa các nhà khoa học từ các quốc gia khác nhau là điều kiện cần thiết cho tiến bộ khoa học, ” Tiến sĩ Vladimir Arlazarov , Giám đốc điều hành của Smart Engines cho biết .
Italian and Russian scientists have teamed up to create a new system for automatic processing of tomographic data
Итальянские и российские ученые объединились для создания новой системы автоматической обработки томографических данных
Итальянские и российские ученые объединились для создания новой системы автоматической обработки томографических данных
Итальянский институт нанотехнологий CNR-Nanotec заключил соглашение о сотрудничестве с российской научной компанией...
www.cnews.ru
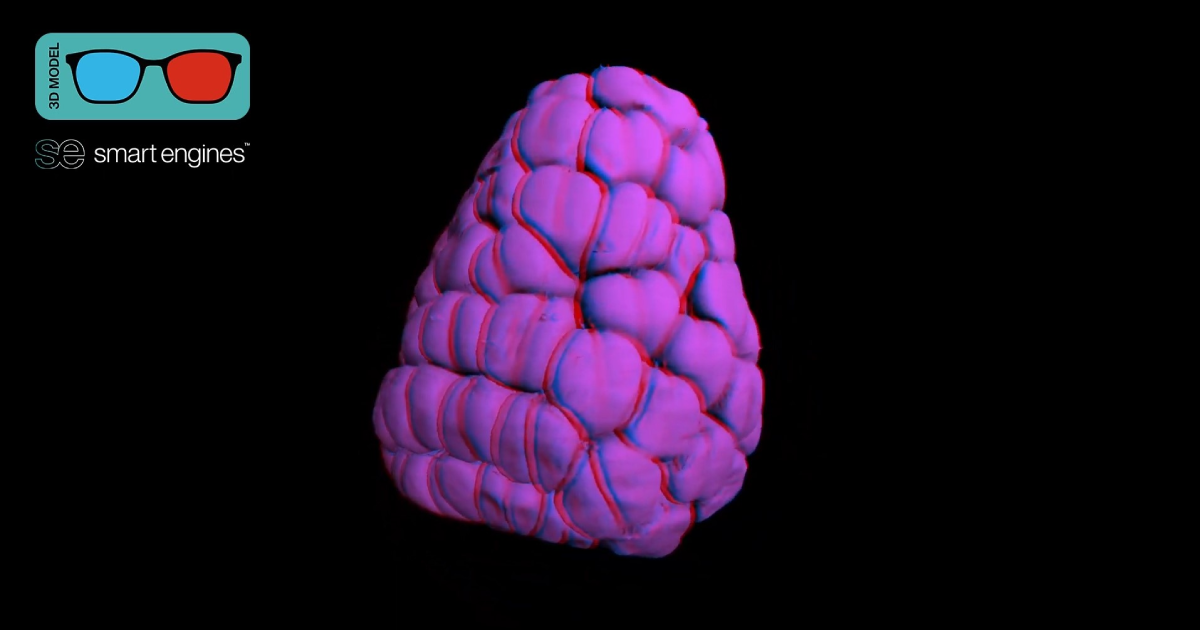
Italian and Russian scientists have teamed up to create a new system for the automatic processing of tomographic data — Smart Engines
News: The research company Smart Engines, specializing in developing algorithms for computer vision, machine learning, and AI, and the CNR Institute for Nanotechnology of the Italian National Research Council (CNR-Nanotec), have signed a three-year cooperation agreement. Its goal is to exchange...
-------------------------------------------------------------------------------------
Smart Engines cung cấp tính năng quét tài liệu nhận dạng cho Fintech
Đối với nhiều người trên thế giới, thẻ y tế COVID-19 và ngân hàng từ xa đã trở thành một phần của cuộc sống, nhưng chúng hiếm khi được kiểm tra đầy đủ. Do đó, cần phải có công nghệ quét để thực hiện kiểm tra tự động thông tin đăng nhập.
Để đạt được mục tiêu đó, công ty Fintech Cashbot của Cộng hòa Séc đã sử dụng Công cụ ID thông minh của Smart Engines để thực hiện nhập dữ liệu khách hàng với nhận dạng ký tự quang học (OCR) của các tài liệu ID.
Việc nhập dữ liệu của khách hàng của Cashbot fintech có trụ sở tại Séc hiện được thực hiện bằng cách sử dụng công nghệ nội địa an toàn để quét tài liệu nhận dạng Smart ID Engine , do Smart Engines phát triển . Trên cơ sở đó, một giải pháp kỹ thuật đã được triển khai cho phép bạn trích xuất dữ liệu hộ chiếu của khách hàng từ ảnh và bản quét một cách nhanh chóng và an toàn để đăng ký dịch vụ Cashbot của Red Stone Now sro
Cashbot sẽ sử dụng các công cụ của công ty Nga để trích xuất dữ liệu từ ảnh chụp và quét hộ chiếu khi đăng ký dịch vụ Cashbot thông qua ứng dụng do Red Stone Now sro phát triển Dữ liệu có trên thẻ ID của Séc được yêu cầu để mở tài khoản dịch vụ tài chính trong nước và không cần được nhập thủ công do tích hợp công nghệ quét tài liệu ID của Smart Engines.
Nhờ triển khai giải pháp dựa trên công nghệ Smart ID Engine, dữ liệu về thẻ căn cước của Séc cần thiết để phát hành các dịch vụ tài chính không cần phải nhập thủ công. Giờ đây, bạn có thể đính kèm bản quét hoặc ảnh chụp tài liệu từ thiết bị di động hoặc máy tính. Hệ thống sẽ trích xuất ngay lập tức các thông tin cần thiết và tự động nhập vào các trường thích hợp của ứng dụng.
Smart Engines cho biết, việc nhận dạng được thực hiện cục bộ mà không cần chuyển bất kỳ dữ liệu nào để duy trì tính bảo mật và quyền riêng tư của dữ liệu.
Smart ID Engine cung cấp tốc độ và độ chính xác cao trong việc nhận dạng các tài liệu nhận dạng, giúp đẩy nhanh quy trình cấp dịch vụ và giảm khả năng xảy ra lỗi trong quá trình nhập liệu thủ công. Đồng thời, tất cả quá trình xử lý được thực hiện trong đường dẫn hoạt động của giải pháp mà không chuyển hình ảnh hoặc các phần của chúng cho các dịch vụ của bên thứ ba hoặc các bên thứ ba. Giờ đây, việc nhập dữ liệu cá nhân và dữ liệu nhạy cảm là an toàn cho tất cả những người tham gia. Smart ID Engine là một giải pháp tuân thủ GDPR, CCPA, PCI DSS.
“Công nghệ này có thể tăng tốc đáng kể quy trình của các dịch vụ từ xa trong cả lĩnh vực B2C và B2B. Quá trình quét tài liệu trên bộ vi xử lý hiện đại chỉ mất chưa đầy một giây. Khách hàng không cần phải điền thủ công dữ liệu ID thẻ nữa; họ cần cung cấp một bức ảnh về nó, ” Marek Hejdusek , Giám đốc của Red Stone Now sro cho biết
Smart Engines provides identity document scanning to fintech

Smart Engines provides identity document scanning to fintech | Biometric Update
For many people around the world, COVID-19 health passes and remote banking have become a part of life, but they are rarely adequately checked.
Cashbot Adopts Smart ID Engine Secure ID Scanning Technology

Cashbot Adopts Smart ID Engine Secure ID Scanning Technology
Cashbot is now carried out using the secure domestic technology for scanning identity documents Smart ID Engine, developed by Smart Engines.
Cashbot Adopts Smart ID Engine Secure ID Scanning Technology
Cashbot Adopts Smart ID Engine Secure ID Scanning Technology — Smart Engines
News: The data entry of clients of the Czech based fintech Cashbot is now carried out using the secure domestic technology for scanning identity documents Smart ID Engine, developed by Smart Engines. On its basis, a technical solution has been implemented that allows you to quickly and safely...
------------------------------------------------------------------
Raiffeisenbank bổ sung công nghệ computer vision của Smart Engines vào ứng dụng di động để quét mã QR
Người dùng ứng dụng di động Raiffeisen Online Russia dành cho Android hiện có thể sử dụng mã QR để thực hiện chuyển tiền, thanh toán các tiện ích, nhiều loại biên lai, hóa đơn, tiền phạt và hoàn tất giao dịch mua sau khi ngân hàng thêm giải pháp Smart Engines vào các ứng dụng di động của mình.
Một thông báo của công ty cho biết động thái này sẽ cải thiện chất lượng của mã QR và quét mã vạch cho các hoạt động thanh toán bằng các ứng dụng di động của ngân hàng, đồng thời đảm bảo độ chính xác quét cao đối với mã QR không chuẩn hoặc bị lỗi. Độ chính xác quét cao được đảm bảo ngay cả đối với mã QR bị hỏng hoặc không chuẩn.
Giải thích về cách sử dụng hệ thống thị giác máy tính, công ty cho biết người dùng cần tập trung máy ảnh của thiết bị của họ vào mã QR hoặc chọn một hình ảnh có mã QR từ thư viện. Sau đó, mã được quét tự động và tất cả các thông tin bắt buộc cần thiết cho việc thanh toán hoặc chuyển tiền sẽ được tự động tải vào biểu mẫu thanh toán.
Việc đưa công nghệ Smart Engines vào ứng dụng Raiffeisenbank để quét mã QR là một sự mở rộng quan hệ đối tác của họ, theo đó tổ chức tài chính này đã thông qua tính năng quét hộ chiếu vào đầu năm nay và thúc đẩy chiến lược thực hiện đổi mới của ngân hàng nhằm nâng cao quy trình nội bộ và tăng tính thân thiện với môi trường và tuân thủ các tiêu chuẩn xã hội và công ty tốt nhất.
“Thanh toán bằng QR giúp mua hàng nhanh chóng và không cần tiếp xúc. Phương thức thanh toán này thân thiện với khách hàng, nhưng độ chính xác của mã nhận dạng là rất quan trọng để nó hoạt động chính xác. Nhờ tích hợp máy quét Smart Engines, khách hàng của chúng tôi sẽ có thể chọn phương thức thanh toán QR trong Raiffeisen Online trong mọi tình huống - ngay cả khi mã thiếu sáng hoặc thiết bị của người dùng được trang bị camera không đủ mạnh, ”Pavel nói Rubakhin, giám đốc sản phẩm kiêm giám đốc Mobile Banking tại ngân hàng Raiffeisen.
Tiến sĩ Vladimir Arlazarov, Giám đốc điều hành của Smart Engines cho biết: “Việc triển khai công nghệ quét mã QR trong các ứng dụng di động là một sự hợp tác dễ chịu và hiệu quả với Smart Engines. “Ngân hàng đã sử dụng sản phẩm phần mềm của công ty để quét ID tại các chi nhánh. Máy quét mã QR cập nhật ngay lập tức trích xuất dữ liệu và giúp quá trình thanh toán trở nên thuận tiện. Thanh toán bằng mã QR là một trong những yếu tố quan trọng của dịch vụ khách hàng từ xa hiện đại trong các ứng dụng ngân hàng di động. Và chúng tôi rất vui vì Raiffeisenbank, một ngân hàng nổi tiếng thế giới, đã chọn sản phẩm phần mềm của chúng tôi để đảm bảo quét mã vạch chất lượng cao trong ứng dụng di động của mình ”.
Raiffeisenbank và Smart Engines chia sẻ các nguyên tắc của chiến lược phát triển bền vững. Quá trình thực hiện đổi mới ngân hàng nhằm mục đích tối ưu hóa các quy trình nội bộ và tăng tính thân thiện với môi trường và tuân thủ các tiêu chuẩn xã hội và doanh nghiệp tốt nhất. Điều đáng chú ý là Smart Engines là một thành viên của sáng kiến quốc tế của Hiệp ước Toàn cầu của Liên hợp quốc cùng với nhóm RBI. Các công nghệ do các nhà khoa học của công ty phát triển giúp giảm thiểu tác động đến môi trường và giảm lượng khí thải carbon trong quá trình học máy và triển khai thuật toán AI.
Sản phẩm phần mềm Smart Engine cho phép bạn quét mã vạch 1D và 2D QR, AZTEC, PDF417, DataMatrix, CODABAR, CODE_39, CODE_93, CODE_128, EAN_8, EAN_13, ITF, UPC_A, UPC_E. Bạn có thể quét mã vạch trên tài liệu, màn hình và các bề mặt khác trong luồng video hoặc ảnh. Máy quét mã vạch trong ứng dụng di động thực hiện quá trình tính toán trên thiết bị của người dùng trong thời gian thực.
Công nghệ quét mã QR mới có sẵn cho khách hàng trong ứng dụng Raiffeisen Online dành cho Android.
SimplyPayMe gần đây cũng đã tích hợp giải pháp OCR của Smart Engines vào ứng dụng thanh toán di động của mình.
Raiffeisenbank adds Smart Engines’ computer vision to mobile apps for QR code scans

Raiffeisenbank adds Smart Engines’ computer vision to mobile apps for QR code scans | Biometric Update
The introduction of Smart Engines’ technology to Raiffeisenbank apps for QR code scanning is an expansion of their partnership.

Raiffeisenbank has introduced Smart Engine technology into its mobile applications for QR code scanning — Smart Engines
News: The QR-code scanning technology developed by Smart Engines has been introduced into Raiffeisen Online Russia. The implemented solution improved the quality of QR codes and barcode scanning for payment operations in a mobile application. High scanning precision is ensured even for damaged...
- Biển số
- OF-626585
- Ngày cấp bằng
- 24/3/19
- Số km
- 8,426
- Động cơ
- 310,264 Mã lực
Tiếp tục với NTechLab, hãng phát triển trí tuệ nhân tạo AI, về công nghệ nhận dạng khuôn mặt, đã được nói quá nhiều từ vol 1 công ty tận bây giờ.Quay lại nhà phát triển hệ thống trí tuệ nhân tạo (AI) nhận diện gương mặt NTechLab đã được nói quá nhiều từ vol trước đến vol này
NtechLab được Đường sắt Ấn Độ ký hợp đồng để triển khai nhận dạng khuôn mặt tại 30 nhà ga
Quy định về quyền riêng tư sẽ được tuân thủ như thế nào vẫn chưa được xác định
View attachment 6548707
Dự án giám sát nhận dạng khuôn mặt đường sắt mới nhất của Ấn Độ đang được tiến hành, với hợp đồng triển khai công nghệ này cho 30 nhà ga, mặc dù những lo ngại về quyền riêng tư vẫn vượt quá giới hạn đối với các quyền tự do dân sự. NtechLab , công ty đang cung cấp cho đường sắt Ấn Độ tại các ga trên khắp Gujarat và Maharashtra, đã xác định Ấn Độ là thị trường quan trọng để giám sát video và chụp ảnh khuôn mặt, theo một cuộc phỏng vấn của Giám đốc điều hành Andrei Telenkov với tờ The Indian Express .
Phần mềm trí tuệ nhân tạo sinh trắc học của NtechLab trong trường hợp này sẽ được triển khai trên 2 trạng thái cho vô số phân tích video khác nhau bao gồm phát hiện tội phạm và giám sát luồng. Công nghệ của công ty bao gồm các giải pháp kinh doanh từ an toàn của công ty đến dịch vụ hẹn hò, cũng như các giải pháp của chính phủ như an ninh giao thông và hệ thống sinh trắc học di động.
Telenkov cho biết công ty đã thuê nhân sự chuyên dụng cho thị trường Ấn Độ, nơi đặt ra những thách thức về nhận dạng khuôn mặt của riêng mình từ quan điểm kỹ thuật. Giám đốc điều hành giải thích, một nguồn cấp dữ liệu video điển hình ở những nơi khác trên thế giới như NtechLab đang cung cấp cho Đường sắt Ấn Độ có thể bao gồm 10 khuôn mặt cùng một lúc, nhưng con số trung bình là gần 50 khuôn mặt trên mỗi khung hình trong các triển khai ở Ấn Độ. "Đó là một thách thức kỹ thuật lớn để phát hiện và nhận dạng tất cả những khuôn mặt đó", Telenkov nói với tờ The Indian Express.
NtechLab đã cung cấp các hệ thống nhận dạng sinh trắc học trong phân đoạn thực thi pháp luật của hệ thống thành phố an toàn ở Moscow, để phát hiện tội phạm và theo dõi các luồng giao thông đi bộ khắp thành phố và Moscow Metro . Thuật toán của hệ thống nhận dạng khuôn mặt Moscow đã được tùy chỉnh để hoạt động với độ phân giải video điển hình của hầu hết các camera giám sát của thành phố (4CIF), theo trang web của công ty .
Vào tháng 8, các bản cập nhật đã được thêm vào bộ phần mềm của công ty, bao gồm việc giới thiệu một thuật toán nâng cao như một phần của FindFace Multi mới, cho phép đối sánh sinh trắc học của khuôn mặt, cũng như bóng của người và xe.
Tuy nhiên, Telenkov nói rằng các thông số xung quanh việc sử dụng công nghệ của NtechLab có thể được tạo ra linh hoạt cho khách hàng, với lý do khách hàng Nga sử dụng công nghệ này cho danh sách đen tội phạm. Các biện pháp bảo vệ cho các mối quan tâm về quyền riêng tư cũng nằm trong tay khách hàng, NtechLab không đóng góp vào việc tạo hoặc tuân thủ cơ sở dữ liệu. Điều này có nghĩa là Đường sắt Ấn Độ, cơ quan quản lý hệ thống đi lại bằng tàu hỏa đô thị trong nước, tùy thuộc vào việc đưa ra các quy định xung quanh việc sử dụng công nghệ và thu thập dữ liệu.
Tuy nhiên, Dự luật Bảo vệ Dữ liệu Cá nhân của Ấn Độ hiện đang bị đình trệ tại quốc hội , khiến quốc gia này không có sự đảm bảo về cách sử dụng sinh trắc học và các dữ liệu khác được thu thập.
NtechLab contracted by Indian Railways to deploy facial recognition at 30 stations
------------------------------------------------------
NtechLab sẽ nghiên cứu nhân khẩu học và số lượng khách tham quan Expo 2020 ở Dubai
View attachment 6548709
NtechLab, một đối tác công nghệ của Rostec State Corporation, sẽ cung cấp nền tảng FindFace Multi để phân tích video đa đối tượng với tính năng nhận dạng khuôn mặt và hình bóng (multi-object video analytics with face and silhouette recognition) để đếm khách tham quan như một phần của quan hệ đối tác công nghệ với gian hàng Nga tại Expo 2020 ở Dubai.
Hệ thống sẽ cho phép bạn tính toán tổng số người truy cập, phân tích thông tin về họ: xác định giới tính, độ tuổi, ước tính số lượng tin thut.
Với sự trợ giúp của FindFace Multi, pavilion của Nga cũng sẽ có thể giám sát việc tuân thủ các biện pháp an toàn và các tiêu chuẩn vệ sinh và dịch tễ. Hệ thống sẽ thông báo cho nhân viên khi có quá nhiều người ở trong một khu vực và thu thập thông tin về hàng đợi, chẳng hạn như họ hình thành vào thời điểm nào và có bao nhiêu người trong hàng đợi.
Expo 2020 hứa hẹn sẽ là một trong những hội chợ lớn nhất trong lịch sử triển lãm thế giới. Đối với chúng tôi, với tư cách là một công ty công nghệ, việc đảm bảo an toàn cho khách tham quan gian hàng Nga tại Expo 2020 là một nhiệm vụ có trách nhiệm và thú vị ”, Andrey Telenkov, Giám đốc điều hành của NtechLab cho biết.
Ngày 23/11, trong khuôn khổ Expo 2020, NtechLab đang tổ chức một hội nghị quốc tế dành riêng cho lĩnh vực phân tích video. Những người tham gia từ mười quốc gia, bao gồm Bangladesh, Ấn Độ, Jordan, Các Tiểu vương quốc Ả Rập Thống nhất và Nga, sẽ thảo luận về việc sử dụng phân tích video của chính quyền thành phố, ngân hàng, chuỗi bán lẻ và ngành công nghiệp, cũng như các xu hướng chính trong nhận dạng khuôn mặt và việc sử dụng có đạo đức trí tuệ nhân tạo.
Expo 2020 sẽ diễn ra tại Dubai từ ngày 1 tháng 10 năm 2021 đến ngày 31 tháng 3 năm 2022.
Ntechlab will study demographics and count visitors to Expo 2020 in Dubai
Ntechlab изучит демографию и посчитает посетителей «Экспо-2020» в Дубае
Ntechlab изучит демографию и посчитает посетителей «Экспо-2020» в Дубае
Компания стала технологическим партнером российского павильона на всемирной выставке, которая открывается в...www.cnews.ru
Như đã nói trong đoạn trích trên từ vol 6, hợp đồng quốc tế gần đây nhất của NTechLab là với đường sắt Ấn Độ
10/2021
Bộ trưởng nhà nước Bộ Đường sắt khánh thành hệ thống giám sát СCTV với thuật toán nhận dạng khuôn mặt của NtechLab trên Ga Surat
Bộ trưởng Bộ Đường sắt, Smt Darshana Jardosh, đã khánh thành hệ thống giám sát СCTV sử dụng thuật toán nhận dạng khuôn mặt NtechLab, hứa hẹn «hệ thống giám sát hiện đại sẽ tăng cường an ninh và an toàn cho hành khách trên ga Surat cơ sở".
Hệ thống đã được đưa ra hai tháng trước. Nhưng do đại dịch, lễ khánh thành đã bị hoãn nhiều lần cho đến khi số ca nhiễm virus mới ở Ấn Độ giảm từ 400.000 xuống còn 20.000.
Phân tích video của NtechLab không chỉ được sử dụng để quản lý lưu lượng hành khách mà còn để theo dõi tội phạm và tìm kiếm những người mất tích. Hệ thống hoạt động trên đoạn đường sắt nhộn nhịp nhất từ Surat, Gujarat đến Bombay hay còn gọi là Mumbai. Tuy nhiên, NtechLab đã quản lý để trở nên hiệu quả và cung cấp sự công nhận đồng thời của tối đa 50 người trong khung.
Minister of State in the Ministry of Railways inaugurated a СCTV surveillance system with NtechLab’s facial recognition algorithm on Surat Station

Minister of State in the Ministry of Railways inaugurated a СCTV surveillance system with NtechLab's facial recognition algorithm on Surat Station | NtechLab
The Minister of State in the Ministry of Railways, Smt Darshana Jardosh, inaugurated a СCTV surveillance system that uses the NtechLab facial recognition algorithm, promising the “state-of-the-art surveillance system will enhance the security and safety of passengers on Surat Station premises”.
 ntechlab.com
ntechlab.com
---------------------------------------------------------------------------------
Tiếp tục về AI, trí tuệ nhân tạo nhận dạng khuôn mặt với công ty Visionlabs của Nga, đã được nói rất nhiều từ những vol trước, cùng với những công ty uy tín khác của Nga như NTechLabs, Tevian, STC, etc.
VisionLabs và Q-Systems để cung cấp hành trình khách hàng thông minh cho các ngân hàng
VisionLabs và Q-Systems đã tạo ra một giải pháp điều hướng khách hàng thông minh. Việc sử dụng tầm nhìn máy tính trong khuôn khổ của hệ thống xếp hàng điện tử sẽ giúp cá nhân hóa hành trình của khách hàng và thay đổi cách tiếp cận đối với việc cung cấp dịch vụ. Ngay cả bây giờ, giải pháp có thể xác định một khách truy cập ở lối vào một chi nhánh ngân hàng, tự động xếp hàng họ theo nhu cầu của họ và cung cấp một bộ dịch vụ riêng lẻ. Điều này sẽ giảm thời gian chờ đợi, tăng tốc độ phục vụ và tăng lòng trung thành của khách hàng. Điều này đã được đại diện của VisionLabs báo cáo cho CNews.
Điều hướng thông minh dựa trên nền tảng phân tích video VisionLabs LUNA , hệ thống quản lý luồng khách truy cập Orchestra và tích hợp với hệ thống CRM của ngân hàng. Với sự trợ giúp của camera giám sát video IP , giải pháp nhận dạng một người ngay khi anh ta bước vào văn phòng. Định danh duy nhất của khách hàng khi vào văn phòng ngân hàng được chuyển cho Dàn nhạc để bắt đầu quá trình nhận dạng. Dựa trên dữ liệu nhận được từ hệ thống CRM, Orchestra sẽ xác định và xếp hàng của khách hàng, dựa trên phân khúc của khách hàng và tính đến lịch sử các yêu cầu đến ngân hàng, gửi SMS chào mừng hoặc thông báo đẩy - quá trình này chỉ mất vài giây. Hệ thống cũng cho phép bạn xác định khách truy cập tại trạm xếp hàng điện tử và hiển thị lời chào dành cho anh ta cũng như lời đề nghị cá nhân về các sản phẩm ngân hàng.
Trong trường hợp này, dữ liệu từ hồ sơ CRM được tự động chuyển đến nhà điều hành. Bằng cách loại bỏ nhu cầu mở thẻ thủ công, cũng như khả năng cập nhật kiến thức về khách hàng và chuẩn bị cho cuộc gặp với họ, tốc độ và chất lượng dịch vụ tăng lên.
Giải pháp VisionLabs và Q-Systems dễ dàng thích ứng với quy trình kinh doanh của từng ngân hàng riêng lẻ và cung cấp các tùy chọn khác nhau để tùy chỉnh hành trình của khách hàng.
“Công nghệ thị giác máy tính đang giúp thay đổi đáng kể ngành ngân hàng và thay đổi cách tiếp cận tương tác với khách hàng. Việc tích hợp các sản phẩm sinh trắc học vào hệ thống xếp hàng điện tử cổ điển sẽ tăng mức độ cung cấp dịch vụ, tối ưu hóa hành trình của khách hàng và trở thành cơ sở để triển khai hiệu quả hơn nữa các dịch vụ kỹ thuật số. Khi thực hiện các giải pháp phức tạp như vậy, cần phải đảm bảo chất lượng nhận dạng cao và các thuật toán VisionLabs đối phó thành công với điều này - điều này được khẳng định bởi các vị trí dẫn đầu hàng năm trong thử nghiệm độc lập quốc tế NIST, ” Ilya Romanov , giám đốc thương mại của VisionLabs cho biết.
“Trong một hoạt động kinh doanh ngân hàng ngày càng cạnh tranh, điều quan trọng là phải đảm bảo trải nghiệm khách hàng được cá nhân hóa và liền mạch. Điều hướng khách hàng hiệu quả và thông minh tại các chi nhánh là một phần quan trọng của quy trình bán hàng. Xác định khách hàng chính xác và nhanh chóng là điểm khởi đầu trên con đường mua hàng. Sau khi xác định được khách hàng, giải pháp từ Q-Systems sẽ tiếp quản và hướng khách hàng ở các phân khúc khác nhau đến nhân viên tốt nhất cho một phân khúc hoặc dịch vụ cụ thể. Strandqvist Per Eric Leonard , Giám đốc điều hành của Q-Systems , cho biết:
Một hiệu quả quan trọng khác của việc triển khai là tăng cường bảo mật. Nhận dạng khuôn mặt cho phép bạn xác định một người từ "danh sách đen" của ngân hàng hoặc phát hiện các ứng dụng có cùng ảnh và hộ chiếu giả khác nhau trong băng chuyền cho vay.
Giới thiệu về VisionLabs
VisionLabs là một trong những công ty uy tín thế giới trong lĩnh vực tạo ra các sản phẩm dựa trên thị giác máy tính và máy học. Công ty đã thực hiện hơn 500 dự án tại 37 quốc gia cho các khách hàng từ các lĩnh vực tài chính, viễn thông, vận tải, năng lượng và bán lẻ. Hơn 1,7 triệu máy ảnh trên toàn thế giới sử dụng phần mềm VisionLabs.
Theo kết quả của các bài kiểm tra độc lập thường xuyên của Viện Tiêu chuẩn và Công nghệ Quốc gia Hoa Kỳ ( NIST ), các thuật toán VisionLabs luôn chiếm vị trí dẫn đầu. Công nghệ Liveness của công ty đã ba lần giành vị trí đầu tiên trong cuộc thi hội thảo CVPR 2019-2021.
Giới thiệu về Q-Systems
Q-Systems là công ty hàng đầu trong thị trường Nga về hệ thống quản lý luồng khách. Công ty bắt đầu hoạt động trên thị trường từ năm 2004: phát triển các hệ thống ở mọi mức độ phức tạp, triển khai, cung cấp hỗ trợ kỹ thuật và dịch vụ 24/7 trên khắp nước Nga từ Kaliningrad đến Vladivostok .
Nhóm Q-Systems có hơn 45 chuyên gia kỹ thuật, bao gồm cả đội ngũ nhân viên phát triển phần mềm chuyên nghiệp của riêng mình. Hàng năm, khoảng 25 nghìn giờ làm việc của các lập trình viên được đầu tư vào việc phát triển các sản phẩm của chúng tôi. Các giải pháp của chúng tôi cực kỳ linh hoạt, vì vậy chúng phù hợp cho cả một tổ chức lớn với sự quản lý tập trung hoặc phân cấp và cho các bộ phận nhỏ, chẳng hạn như hiệu thuốc, quầy lễ tân công chứng hoặc bộ phận nhân sự của công ty.
VisionLabs and Q-Systems will offer a smart customer journey for banks
VisionLabs и Q-Systems предложат умный клиентский путь для банков
VisionLabs и Q-Systems предложат умный клиентский путь для банков
Компании VisionLabs и Q-Systems создали решение для умной навигации клиента. Использование компьютерного зрения...
www.cnews.ru
---------------------------------------------------------------
MTS mua lại VisionLabs
PJSC MTS, một công ty cung cấp dịch vụ kỹ thuật số, truyền thông và viễn thông của Nga, thông báo rằng Intema, một công ty con của MTS II LLC (thương hiệu MTS AI), đã ký tài liệu ràng buộc về việc mua lại VisionLabs BV với số tiền khoảng 7 tỷ rub. Số tiền cuối cùng của giao dịch sẽ được xác định dựa trên kết quả đạt được các chỉ số mục tiêu của VisionLabs trong vòng ba năm. Đại diện của MTS đã báo cáo điều này với CNews.
VisionLabs sẽ trở thành công ty có danh mục đầu tư lớn nhất của tập đoàn Intema, được tạo ra bởi MTS AI như một thương hiệu mới nhằm phát triển các sản phẩm AI có thể tiếp thị và hoạt động trên thị trường quốc tế. Theo kết quả của giao dịch, MTS AI, thông qua công ty con Intema mới, sẽ mua lại cổ phần kiểm soát từ những người sáng lập VisionLabs, người sở hữu 51,77% cổ phần trước giao dịch, cũng như cấu trúc Sberbank - 25,07% và liên doanh của AFK Sistema quỹ Sistema_VC - 23,16% cổ phiếu. Alexander Khanin sẽ vẫn là Chủ tịch Hội đồng quản trị VisionLabs . Ông và người sáng lập thứ hai của VisionLabs, Ivan Laptev, có kế hoạch chuyển đổi cổ phần VisionLabs của riêng họ thành cổ phần sở hữu trong cấu trúc MTS AI.
MTS đã nhận được tất cả các phê duyệt cần thiết của công ty cho thương vụ này. Việc kết thúc giao dịch có điều kiện là phải nhận được các phê duyệt theo quy định. Giao dịch đã được đề nghị phê duyệt bởi Ủy ban kiểm toán của Hội đồng quản trị MTS và sau đó được Hội đồng quản trị của MTS chấp thuận. BofA Securities đóng vai trò cố vấn tài chính. Herbert Smith Freehills đóng vai trò cố vấn pháp lý.
“Tại MTS AI, chúng tôi đang hình thành trung tâm chuyên môn mạnh mẽ nhất trong lĩnh vực trí tuệ nhân tạo, nơi tập hợp những sự phát triển, đội ngũ và năng lực tốt nhất trên thị trường. Việc mua lại VisionLabs sẽ củng cố danh mục sản phẩm MTS AI trong lĩnh vực phân tích video được yêu cầu cao, mà chúng tôi sẽ có thể sử dụng cả hai để khai thác tiềm năng của hệ sinh thái dịch vụ kỹ thuật số MTS và vì lợi ích của khách hàng doanh nghiệp của chúng tôi ở Nga và trên thị trường quốc tế, ”Chủ tịch MTS Vyacheslav Nikolaev cho biết .
“ Các công nghệ trí tuệ nhân tạo sẽ trở thành động lực chính cho sự phát triển của doanh nghiệp và xã hội trong vài năm tới. Và chúng tôi tại MTS AI đã quyết định tận dụng cơ hội này bằng cách thành lập công ty Intema , với mục tiêu chính là tìm kiếm các sản phẩm và ý tưởng có triển vọng trong lĩnh vực AI, giúp phát triển và triển khai chúng trên thị trường thông qua đầu tư. công cụ và hỗ trợ của chuyên gia. Tại điểm giao nhau giữa các bước phát triển khác nhau của các công ty trong danh mục đầu tư, chúng tôi sẽ tạo ra những sản phẩm đột phá mới. Đồng thời, VisionLabs sẽ tiếp tục hoạt động tự chủ sau giao dịch và giữ nguyên chiến lược kinh doanh cũng như đội ngũ ”, Alexander Khanin , Giám đốc điều hành của MTS AI cho biết .
“Khoản đầu tư của chúng tôi vào VisionLabs vào năm 2016 và việc rút khỏi tài sản này sau đó là một giao dịch chuẩn mực cho một quỹ đầu tư mạo hiểm doanh nghiệp đã mang lại giá trị rõ ràng cho cả quỹ và công ty nói chung. Mặt khác, ngay từ khi thành lập quỹ, chúng tôi đã lựa chọn hoàn toàn đúng đắn và đầu tư vào một doanh nghiệp hóa ra rất thành công, tăng trưởng đáng kể về giá trị và mang lại lợi tức đầu tư tốt. Mặt khác, kết quả của giao dịch, chúng tôi đã nghiêm túc củng cố năng lực của Tập đoàn Sistema trong một lĩnh vực đầy hứa hẹn như trí tuệ nhân tạo, và tạo cơ sở để mở rộng hơn nữa lĩnh vực này ”, Dmitry Filatov , Chủ tịch của Sistema_VC cho biết .
“Khoản đầu tư vào VisionLabs đã mang lại cho chúng tôi lợi nhuận tuyệt vời trên vốn đầu tư - giá trị cổ phần của Sber trong công ty đã tăng 3,7 lần kể từ khi gia nhập vào năm 2018. Giờ đây, Sber có năng lực sinh trắc học đẳng cấp thế giới của riêng mình, mà chúng tôi đang phát triển, bao gồm cả việc sử dụng chuyên môn công nghệ của VisionLabs. Hợp tác với VisionLabs sẽ tiếp tục trong một số lĩnh vực chính cần thiết để ngân hàng phát triển hơn nữa lĩnh vực này, chẳng hạn như nền tảng sinh trắc học cho SmartBio, nhận dạng khuôn mặt và cử chỉ cho SberPortal. Ngoài ra, chúng tôi sẽ tiếp tục thực hiện các hợp đồng hiện tại với VisionLabs và làm việc với các công ty trong hệ sinh thái và các đối tác của Sber. Lev Khasis , Phó Chủ tịch thứ nhất của Hội đồng quản trị của Sberbank .
tài liệu tham khảo
VisionLabs là một trong những công ty uy tín thế giới trong lĩnh vực tạo ra các sản phẩm dựa trên thị giác máy tính và máy học. Công ty đã thực hiện hơn 500 dự án trong lĩnh vực thị giác máy tính tại 37 quốc gia cho hơn 270 khách hàng từ các lĩnh vực tài chính, viễn thông, bán lẻ, vận tải và năng lượng. Hơn 1,7 triệu máy ảnh trên toàn thế giới sử dụng phần mềm VisionLabs.
Các thuật toán nhận dạng VisionLabs thường xuyên xếp hạng trong top 3 của NIST về tốc độ truy xuất bộ mô tả và kết quả nhận dạng. Thuật toán xác thực Liveness đã giành vị trí đầu tiên ba lần trong cuộc thi Liveness trong khuôn khổ hội thảo CVPR 2019-2021. Doanh thu năm 2020 của công ty vượt 1,1 tỷ rúp.
MTS acquires VisionLabs
МТС приобретает компанию VisionLabs
МТС приобретает компанию VisionLabs
ПАО «МТС», российская компания по предоставлению цифровых, медийных и телекоммуникационных сервисов, сообщает...
www.cnews.ru
Chỉnh sửa cuối:
- Biển số
- OF-626585
- Ngày cấp bằng
- 24/3/19
- Số km
- 8,426
- Động cơ
- 310,264 Mã lực
RT-Techpriemka: 5 sự thật về công ty

82 năm trước, lịch sử của nhà leader tương lai của thị trường Nga về dịch vụ kiểm soát chất lượng vật liệu và bán thành phẩm cho ngành hàng không và quốc phòng, RT-Tekhpriemka, đã bắt đầu.
Ngày nay, ngoài việc tổ chức kiểm soát chất lượng, công ty còn tham gia vào lĩnh vực nâng cao hiệu quả của doanh nghiệp - công ty tiến hành chứng nhận hệ thống quản lý, thực hiện các hoạt động giáo dục và giới thiệu các giải pháp đổi mới tại doanh nghiệp.
Vào ngày sinh nhật của RT-Techpriemka, chúng tôi nhớ lại năm sự kiện chính về công ty.
1 / RT-Tekhpriemka là sự kế thừa của sự chấp nhận kỹ thuật máy bay của thời Chiến tranh Vệ quốc Vĩ đại

Ảnh: S. Malobitsky. Nghiệm thu thành phẩm súng cối trung đoàn 120 ly kiểu 1941
RT-Tekhpriemka là sản phẩm kế thừa trực tiếp những chấp nhận kỹ thuật hàng không của thời Chiến tranh Vệ quốc Vĩ đại , khi cuộc sống và tương lai của một đất nước rộng lớn phụ thuộc trực tiếp vào chất lượng của thiết bị được sản xuất.
Vì vậy, để đảm bảo chất lượng sản phẩm cao nhất của phòng thiết kế hàng không Liên Xô, cần có một hệ thống nhiều khâu để kiểm tra chất lượng vật liệu, cụm, chi tiết và cụm máy. Để ngăn chặn nguyên liệu và bán thành phẩm kém chất lượng vào sản xuất, ngày 11 tháng 1 năm 1940, Hội đồng kinh tế thuộc Hội đồng nhân dân Liên Xô đã thông qua nghị quyết về việc nghiệm thu kỹ thuật của Hội đồng nhân dân Ngành công nghiệp hàng không.
Và trong gần một thế kỷ, mục tiêu của công ty là đóng góp vào sự phát triển của nền kinh tế quốc dân bằng cách ngăn chặn việc tiếp nhận các nguyên liệu và bán thành phẩm giả.
2 / Trên cơ sở Công ty đã thành lập Trung tâm Năng lực Hệ thống Quản lý Chất lượng của Tổng Công ty Nhà nước Rostec

Đóng góp vào sự phát triển toàn diện của ngành công nghiệp Nga, cũng như đảm bảo an ninh công nghệ và chiến lược của đất nước, Rostec State Corporation đang thực hiện Chiến lược phát triển đến năm 2025. Một trong những nhiệm vụ trọng tâm trong quá trình thực hiện là nâng cao chất lượng, hiệu quả hoạt động và sức cạnh tranh của sản phẩm. Để triển khai nhiệm vụ này, năm 2017, trên cơ sở Công ty cổ phần RT-Tekhpriemka, Trung tâm Năng lực Hệ thống Quản lý Chất lượng Tổng công ty Nhà nước Rostec được thành lập .
Việc thành lập Trung tâm đã trở thành một giai đoạn mới trong sự phát triển của RT-Techpriemka. Nhờ đó, ngày nay công ty không chỉ thực hiện thành công công việc trong lĩnh vực hoạt động “lịch sử” - kiểm soát chất lượng sản phẩm phục vụ nhu cầu của ngành hàng không và quốc phòng, mà còn phát triển ổn định, mở rộng năng lực về tiêu chuẩn hóa, chứng nhận, tự động hóa sản xuất và các khu vực khác.
Ngày nay, hơn 40 văn phòng đại diện của RT-Tekhpriemka hoạt động tại các khu vực của đất nước, cung cấp quyền kiểm soát sản xuất tại 140 doanh nghiệp công nghiệp. Khách hàng và những người thực thi lệnh quốc phòng của nhà nước giao kết với RT-Techpriemka để đánh giá sản phẩm tại các doanh nghiệp trong ngành luyện kim, hóa chất, hóa dầu và điện.
3 / RT-Techpriemka tiến hành chứng nhận quốc gia và quốc tế

Một trong những hoạt động chính của công ty là chứng nhận sản phẩm và sản xuất trong nước và quốc tế, điều này không thể thực hiện được nếu không có một tổ chức kiểm soát chất lượng và nghiệm thu các thành phần. Nó được thực hiện bởi Trung tâm Chứng nhận Rostec-Certificate được thành lập vào năm 2015 . Ngày nay nó là cơ quan chính và đối tác đáng tin cậy để chứng nhận các hệ thống quản lý trong Hệ thống Chứng nhận Tự nguyện của Tổng công ty Nhà nước Rostec.
Trung tâm chứng nhận các hệ thống quản lý theo tiêu chuẩn của Nga và quốc tế theo thỏa thuận cấp phép với Quality Austria GmbH.
4 / RT-Tekhpriemka sẽ đảm bảo độ chính xác của các phép đo của các sản phẩm Rostec

Sự phát triển của công nghiệp là không thể thiếu một hệ thống tin cậy và chính xác để đảm bảo tính thống nhất của các phép đo - đo lường. Ngày nay, kết quả đo được sử dụng ở tất cả các giai đoạn trong vòng đời của bất kỳ sản phẩm công nghệ cao nào: từ thiết kế đến thải bỏ.
Vào năm 2021, Dịch vụ Đo lường được thành lập tại Rostec State Corporation, tổ chức đứng đầu là Công ty Cổ phần RT-Tekhpriemka. Cấu trúc mới hệ thống hóa các hoạt động của các doanh nghiệp Rostec để đảm bảo tính thống nhất và độ chính xác của phép đo các sản phẩm được sản xuất. RT-Techpriemka có kế hoạch hình thành một hệ thống thông tin thống nhất của Tổng công ty Nhà nước để truyền tải thông tin đồng thời trong lĩnh vực đảm bảo tính thống nhất của các phép đo.
5 / RT-Techpriemka sử dụng trí tuệ nhân tạo trong cuộc chiến chống lại các khiếm khuyết

Trong vài năm qua, RT-Techpriemka đã và đang tạo ra một môi trường thông tin thống nhất trong lĩnh vực chất lượng bằng cách giới thiệu các giải pháp kỹ thuật số duy nhất tại các doanh nghiệp công nghiệp - hệ thống truy xuất nguồn gốc điện tử, Machine Vision, và các giải pháp khác. Đặc biệt, công nghệ thị giác máy được sử dụng để kiểm soát chất lượng bề mặt thép cung cấp cho các doanh nghiệp thuộc cụm hàng không Rostec. Nó được sử dụng để sản xuất các thành phần cho hệ thống trực thăng của Nga, bao gồm cường kích Ka-52 Alligator và Mi-28 Night Hunter.
Tổ hợp phần mềm và phần cứng của dự án Machine Vision được xây dựng trên cơ sở trí tuệ nhân tạo và các công nghệ mạng nơ-ron, giúp phát hiện ra các khuyết tật với độ chính xác lên đến 300 micron.
RT-Techpriemka: five facts about the company
«РТ-Техприемка»: пять фактов о компании
 rostec.ru
rostec.ru
-----------------------------------------------------------------------
Kết quả trong năm của nhà máy sản xuất "Konstantin Chaikin"

Một trong những kết quả quan trọng của năm 2021 đối với Konstantin Chaikin là sự xuất hiện của những chiếc đồng hồ mới trong bộ sưu tập của ông, mỗi chiếc đều là một bước đột phá theo cách riêng của mình. Đồng hồ Minotaur được trang bị hai đĩa chỉ ngày trong tuần, một phát minh mới của Chaikin. Các cửa sổ chỉ báo, được bao phủ bởi thấu kính sapphire, là “lỗ mũi” của “Minotaur”: “mặt” - mặt số có các đặc điểm của một nhân vật thần thoại Hy Lạp cổ đại. Ristmon đã lọt vào chung kết cuộc thi GPHG trong “Lịch và sự biến chứng của thiên văn ”đề cử."The Martian", được Chaikin tạo ra đặc biệt cho cuộc đấu giá từ thiện Only Watch và được trang bị tourbillon sao Hỏa đầu tiên trong lịch sử và tourbillon đeo tay đầu tiên ở Nga. Đồng hồ cũng thực hiện lịch sao Hỏa theo hệ thống Gangale, mà Chaikin đã phát triển một chỉ số đặc biệt: ngày và ngày trong tuần được hiển thị bằng một mũi tên. Cuối cùng, cuộc nổi dậy của Minions do Chaikin trình bày tại Tuần lễ đồng hồ Dubai. Chiếc đồng hồ này được trang bị một mô-đun hiển thị được phát triển bởi bậc thầy đặc biệt cho mẫu đồng hồ này. Rotor của cơ chế được khắc bằng một "chân dung" của minion đang phát triển đầy đủ.




 chaykin.ru
chaykin.ru
82 năm trước, lịch sử của nhà leader tương lai của thị trường Nga về dịch vụ kiểm soát chất lượng vật liệu và bán thành phẩm cho ngành hàng không và quốc phòng, RT-Tekhpriemka, đã bắt đầu.
Ngày nay, ngoài việc tổ chức kiểm soát chất lượng, công ty còn tham gia vào lĩnh vực nâng cao hiệu quả của doanh nghiệp - công ty tiến hành chứng nhận hệ thống quản lý, thực hiện các hoạt động giáo dục và giới thiệu các giải pháp đổi mới tại doanh nghiệp.
Vào ngày sinh nhật của RT-Techpriemka, chúng tôi nhớ lại năm sự kiện chính về công ty.
1 / RT-Tekhpriemka là sự kế thừa của sự chấp nhận kỹ thuật máy bay của thời Chiến tranh Vệ quốc Vĩ đại
Ảnh: S. Malobitsky. Nghiệm thu thành phẩm súng cối trung đoàn 120 ly kiểu 1941
RT-Tekhpriemka là sản phẩm kế thừa trực tiếp những chấp nhận kỹ thuật hàng không của thời Chiến tranh Vệ quốc Vĩ đại , khi cuộc sống và tương lai của một đất nước rộng lớn phụ thuộc trực tiếp vào chất lượng của thiết bị được sản xuất.
Vì vậy, để đảm bảo chất lượng sản phẩm cao nhất của phòng thiết kế hàng không Liên Xô, cần có một hệ thống nhiều khâu để kiểm tra chất lượng vật liệu, cụm, chi tiết và cụm máy. Để ngăn chặn nguyên liệu và bán thành phẩm kém chất lượng vào sản xuất, ngày 11 tháng 1 năm 1940, Hội đồng kinh tế thuộc Hội đồng nhân dân Liên Xô đã thông qua nghị quyết về việc nghiệm thu kỹ thuật của Hội đồng nhân dân Ngành công nghiệp hàng không.
Và trong gần một thế kỷ, mục tiêu của công ty là đóng góp vào sự phát triển của nền kinh tế quốc dân bằng cách ngăn chặn việc tiếp nhận các nguyên liệu và bán thành phẩm giả.
2 / Trên cơ sở Công ty đã thành lập Trung tâm Năng lực Hệ thống Quản lý Chất lượng của Tổng Công ty Nhà nước Rostec
Đóng góp vào sự phát triển toàn diện của ngành công nghiệp Nga, cũng như đảm bảo an ninh công nghệ và chiến lược của đất nước, Rostec State Corporation đang thực hiện Chiến lược phát triển đến năm 2025. Một trong những nhiệm vụ trọng tâm trong quá trình thực hiện là nâng cao chất lượng, hiệu quả hoạt động và sức cạnh tranh của sản phẩm. Để triển khai nhiệm vụ này, năm 2017, trên cơ sở Công ty cổ phần RT-Tekhpriemka, Trung tâm Năng lực Hệ thống Quản lý Chất lượng Tổng công ty Nhà nước Rostec được thành lập .
Việc thành lập Trung tâm đã trở thành một giai đoạn mới trong sự phát triển của RT-Techpriemka. Nhờ đó, ngày nay công ty không chỉ thực hiện thành công công việc trong lĩnh vực hoạt động “lịch sử” - kiểm soát chất lượng sản phẩm phục vụ nhu cầu của ngành hàng không và quốc phòng, mà còn phát triển ổn định, mở rộng năng lực về tiêu chuẩn hóa, chứng nhận, tự động hóa sản xuất và các khu vực khác.
Ngày nay, hơn 40 văn phòng đại diện của RT-Tekhpriemka hoạt động tại các khu vực của đất nước, cung cấp quyền kiểm soát sản xuất tại 140 doanh nghiệp công nghiệp. Khách hàng và những người thực thi lệnh quốc phòng của nhà nước giao kết với RT-Techpriemka để đánh giá sản phẩm tại các doanh nghiệp trong ngành luyện kim, hóa chất, hóa dầu và điện.
3 / RT-Techpriemka tiến hành chứng nhận quốc gia và quốc tế
Một trong những hoạt động chính của công ty là chứng nhận sản phẩm và sản xuất trong nước và quốc tế, điều này không thể thực hiện được nếu không có một tổ chức kiểm soát chất lượng và nghiệm thu các thành phần. Nó được thực hiện bởi Trung tâm Chứng nhận Rostec-Certificate được thành lập vào năm 2015 . Ngày nay nó là cơ quan chính và đối tác đáng tin cậy để chứng nhận các hệ thống quản lý trong Hệ thống Chứng nhận Tự nguyện của Tổng công ty Nhà nước Rostec.
Trung tâm chứng nhận các hệ thống quản lý theo tiêu chuẩn của Nga và quốc tế theo thỏa thuận cấp phép với Quality Austria GmbH.
4 / RT-Tekhpriemka sẽ đảm bảo độ chính xác của các phép đo của các sản phẩm Rostec
Sự phát triển của công nghiệp là không thể thiếu một hệ thống tin cậy và chính xác để đảm bảo tính thống nhất của các phép đo - đo lường. Ngày nay, kết quả đo được sử dụng ở tất cả các giai đoạn trong vòng đời của bất kỳ sản phẩm công nghệ cao nào: từ thiết kế đến thải bỏ.
Vào năm 2021, Dịch vụ Đo lường được thành lập tại Rostec State Corporation, tổ chức đứng đầu là Công ty Cổ phần RT-Tekhpriemka. Cấu trúc mới hệ thống hóa các hoạt động của các doanh nghiệp Rostec để đảm bảo tính thống nhất và độ chính xác của phép đo các sản phẩm được sản xuất. RT-Techpriemka có kế hoạch hình thành một hệ thống thông tin thống nhất của Tổng công ty Nhà nước để truyền tải thông tin đồng thời trong lĩnh vực đảm bảo tính thống nhất của các phép đo.
5 / RT-Techpriemka sử dụng trí tuệ nhân tạo trong cuộc chiến chống lại các khiếm khuyết
Trong vài năm qua, RT-Techpriemka đã và đang tạo ra một môi trường thông tin thống nhất trong lĩnh vực chất lượng bằng cách giới thiệu các giải pháp kỹ thuật số duy nhất tại các doanh nghiệp công nghiệp - hệ thống truy xuất nguồn gốc điện tử, Machine Vision, và các giải pháp khác. Đặc biệt, công nghệ thị giác máy được sử dụng để kiểm soát chất lượng bề mặt thép cung cấp cho các doanh nghiệp thuộc cụm hàng không Rostec. Nó được sử dụng để sản xuất các thành phần cho hệ thống trực thăng của Nga, bao gồm cường kích Ka-52 Alligator và Mi-28 Night Hunter.
Tổ hợp phần mềm và phần cứng của dự án Machine Vision được xây dựng trên cơ sở trí tuệ nhân tạo và các công nghệ mạng nơ-ron, giúp phát hiện ra các khuyết tật với độ chính xác lên đến 300 micron.
RT-Techpriemka: five facts about the company
«РТ-Техприемка»: пять фактов о компании
«РТ-Техприемка»: пять фактов о компании
-----------------------------------------------------------------------
Kết quả trong năm của nhà máy sản xuất "Konstantin Chaikin"
Một trong những kết quả quan trọng của năm 2021 đối với Konstantin Chaikin là sự xuất hiện của những chiếc đồng hồ mới trong bộ sưu tập của ông, mỗi chiếc đều là một bước đột phá theo cách riêng của mình. Đồng hồ Minotaur được trang bị hai đĩa chỉ ngày trong tuần, một phát minh mới của Chaikin. Các cửa sổ chỉ báo, được bao phủ bởi thấu kính sapphire, là “lỗ mũi” của “Minotaur”: “mặt” - mặt số có các đặc điểm của một nhân vật thần thoại Hy Lạp cổ đại. Ristmon đã lọt vào chung kết cuộc thi GPHG trong “Lịch và sự biến chứng của thiên văn ”đề cử."The Martian", được Chaikin tạo ra đặc biệt cho cuộc đấu giá từ thiện Only Watch và được trang bị tourbillon sao Hỏa đầu tiên trong lịch sử và tourbillon đeo tay đầu tiên ở Nga. Đồng hồ cũng thực hiện lịch sao Hỏa theo hệ thống Gangale, mà Chaikin đã phát triển một chỉ số đặc biệt: ngày và ngày trong tuần được hiển thị bằng một mũi tên. Cuối cùng, cuộc nổi dậy của Minions do Chaikin trình bày tại Tuần lễ đồng hồ Dubai. Chiếc đồng hồ này được trang bị một mô-đun hiển thị được phát triển bởi bậc thầy đặc biệt cho mẫu đồng hồ này. Rotor của cơ chế được khắc bằng một "chân dung" của minion đang phát triển đầy đủ.
Главная - Константин Чайкин | Часовая Мануфактура
Производитель часов, мануфактура Константина Чайкина, создаем самые сложные и дорогие российские часы
- Biển số
- OF-626585
- Ngày cấp bằng
- 24/3/19
- Số km
- 8,426
- Động cơ
- 310,264 Mã lực
Ngân hàng Trung ương: Thặng dư thương mại nước ngoài của Nga năm 2021 tăng lên 185,9 tỷ USD
Theo Ngân hàng Trung ương Nga, thặng dư cán cân thanh toán vãng lai của Liên bang Nga năm 2021 tăng 3,3 lần so với năm 2020, lên 120 tỷ USD.
Các nhà phân tích của Ngân hàng Trung ương giải thích rằng thặng dư tài khoản vãng lai kỷ lục được xác định là do cán cân thương mại tăng gấp hai lần (lên 185,9 tỷ USD) do xuất khẩu tăng mạnh (47% / năm lên 489,8 tỷ USD) với môi trường giá cả thuận lợi và nhập khẩu tăng ít hơn (27%, lên 303,9 tỷ USD).
Thâm hụt cán cân dịch vụ tăng 17% so với năm ngoái, lên mức 19,9 tỷ USD.
“Khoảng một nửa số tiền được chuyển đến là để tích lũy dự trữ theo quy tắc tài khóa. Một nửa còn lại được phân bổ xấp xỉ bằng nhau cho việc tích lũy tài sản nước ngoài và giảm các khoản nợ phải trả bên ngoài: so với quý 3, trong quý 4, việc sử dụng thanh khoản ngoại hối đầu vào của các tập đoàn, ngân hàng và cơ quan chính phủ đã thay đổi - họ ưu tiên hơn để hoàn trả các nghĩa vụ của họ đối với các khoản nợ nước ngoài, ”Ngân hàng Trung ương lưu ý.
Trong năm, 30,7 tỷ đô la đầu tư trực tiếp đến khu vực phi tài chính của Liên bang Nga, và đầu tư từ quốc gia này ra nước ngoài lên tới 53,6 tỷ đô la.
 www.kommersant.ru
www.kommersant.ru
---------------------------------------------------------------------------
Có bao nhiêu sản phẩm có cồn được sản xuất ở Nga vào năm 2021
Hãy để tôi bắt đầu với một sản phẩm thực sự của Nga, rượu vodka. Vì vậy, vào cuối năm 2021, sản lượng của nó đã tăng 1,9% và lên tới 80,93 triệu decalitres. Vì vậy, rõ ràng, chúng tôi đã không uống ít hơn, tình hình cuộc sống bắt buộc. Tổng sản lượng sản xuất các sản phẩm có cồn (không bao gồm bia, đồ uống làm từ bia, rượu táo, rượu poiré và rượu mead) năm 2021 giảm 0,1% và đạt 181,79 triệu decalitre. Sản lượng sản xuất đồ uống có cồn có độ mạnh trên 9% vào năm 2021 tăng 4,2% và lên tới 106,4 triệu decalitres.

Mặt khác, sản lượng rượu sản xuất năm ngoái đã giảm 14,3% so với con số của năm 2020 và lên tới 60,27 triệu decalitres. Đồng thời, sản lượng rượu champagne sản xuất năm 2021 giảm 2,5% và đạt 12,91 triệu decalitres. Sản lượng rượu vang sản xuất năm 2021 giảm 3,6% và đạt 29,81 triệu decalitres. Sản lượng rượu trái cây (trái cây) sản xuất năm 2021 giảm 26,3% và đạt 10,93 triệu decalitres.

Sản lượng đồ uống có cồn được sản xuất không pha thêm cồn etylic vào năm 2021 giảm 42% và đạt 6,26 triệu decalitres. Sản lượng sản xuất đồ uống có cồn pha thêm cồn etylic vào năm 2021 giảm 64,6% và đạt 140,47 nghìn decalitre. Sản lượng rượu cognac sản xuất năm 2021 giảm 2,4% và đạt 7,98 triệu decalitres.
Theo Ngân hàng Trung ương Nga, thặng dư cán cân thanh toán vãng lai của Liên bang Nga năm 2021 tăng 3,3 lần so với năm 2020, lên 120 tỷ USD.
Các nhà phân tích của Ngân hàng Trung ương giải thích rằng thặng dư tài khoản vãng lai kỷ lục được xác định là do cán cân thương mại tăng gấp hai lần (lên 185,9 tỷ USD) do xuất khẩu tăng mạnh (47% / năm lên 489,8 tỷ USD) với môi trường giá cả thuận lợi và nhập khẩu tăng ít hơn (27%, lên 303,9 tỷ USD).
Thâm hụt cán cân dịch vụ tăng 17% so với năm ngoái, lên mức 19,9 tỷ USD.
“Khoảng một nửa số tiền được chuyển đến là để tích lũy dự trữ theo quy tắc tài khóa. Một nửa còn lại được phân bổ xấp xỉ bằng nhau cho việc tích lũy tài sản nước ngoài và giảm các khoản nợ phải trả bên ngoài: so với quý 3, trong quý 4, việc sử dụng thanh khoản ngoại hối đầu vào của các tập đoàn, ngân hàng và cơ quan chính phủ đã thay đổi - họ ưu tiên hơn để hoàn trả các nghĩa vụ của họ đối với các khoản nợ nước ngoài, ”Ngân hàng Trung ương lưu ý.
Trong năm, 30,7 tỷ đô la đầu tư trực tiếp đến khu vực phi tài chính của Liên bang Nga, và đầu tư từ quốc gia này ra nước ngoài lên tới 53,6 tỷ đô la.
Платежный дисбаланс – Газета Коммерсантъ № 8 (7209) от 19.01.2022
Рекордный приток валюты от внешней торговли, как и геополитическая напряженность, усилившиеся к концу года, не стали причиной резкого роста оттока капитала из России — он оказался ниже прогнозов ЦБ. Впрочем, объемы вывода денег инвесторов из госбумаг и рыночных бумаг в четвертом квартале...
---------------------------------------------------------------------------
Có bao nhiêu sản phẩm có cồn được sản xuất ở Nga vào năm 2021
Hãy để tôi bắt đầu với một sản phẩm thực sự của Nga, rượu vodka. Vì vậy, vào cuối năm 2021, sản lượng của nó đã tăng 1,9% và lên tới 80,93 triệu decalitres. Vì vậy, rõ ràng, chúng tôi đã không uống ít hơn, tình hình cuộc sống bắt buộc. Tổng sản lượng sản xuất các sản phẩm có cồn (không bao gồm bia, đồ uống làm từ bia, rượu táo, rượu poiré và rượu mead) năm 2021 giảm 0,1% và đạt 181,79 triệu decalitre. Sản lượng sản xuất đồ uống có cồn có độ mạnh trên 9% vào năm 2021 tăng 4,2% và lên tới 106,4 triệu decalitres.
Mặt khác, sản lượng rượu sản xuất năm ngoái đã giảm 14,3% so với con số của năm 2020 và lên tới 60,27 triệu decalitres. Đồng thời, sản lượng rượu champagne sản xuất năm 2021 giảm 2,5% và đạt 12,91 triệu decalitres. Sản lượng rượu vang sản xuất năm 2021 giảm 3,6% và đạt 29,81 triệu decalitres. Sản lượng rượu trái cây (trái cây) sản xuất năm 2021 giảm 26,3% và đạt 10,93 triệu decalitres.
Sản lượng đồ uống có cồn được sản xuất không pha thêm cồn etylic vào năm 2021 giảm 42% và đạt 6,26 triệu decalitres. Sản lượng sản xuất đồ uống có cồn pha thêm cồn etylic vào năm 2021 giảm 64,6% và đạt 140,47 nghìn decalitre. Sản lượng rượu cognac sản xuất năm 2021 giảm 2,4% và đạt 7,98 triệu decalitres.
- Biển số
- OF-626585
- Ngày cấp bằng
- 24/3/19
- Số km
- 8,426
- Động cơ
- 310,264 Mã lực
Những hạn chế mới đối với khí mêtan sẽ ảnh hưởng đến nền nông nghiệp của Liên bang Nga
Pavel Zavalny , Chủ tịch Ủy ban Năng lượng của Duma Quốc gia , khẳng định các đề xuất của phương Tây nhằm hạn chế phát thải khí mê-tan , đồng thời lưu ý rằng các hạn chế bổ sung sẽ ảnh hưởng đến nông nghiệp.
Than và mêtan rất quan trọng đối với chính sách khí hậu của Liên bang Nga
Chính sách khí hậu đã trở thành một xu hướng chính trong chương trình nghị sự quốc tế. Liên bang Nga cũng đã đặt ra lộ trình trung lập các-bon, nhưng sẽ không theo xu hướng của các quốc gia Tây Âu và sẽ tiếp tục xác định chiến lược dựa trên lợi ích quốc gia.
Vị trí của Moscow tại Diễn đàn Gaidar đã được Ruslan Edelgeriev , Đại diện đặc biệt của Tổng thống Liên bang Nga về các vấn đề khí hậu mô tả .
“Vấn đề phát thải khí mêtan đang được đặt ra trên thế giới. Tại diễn đàn ở Glasgow, chúng tôi không tham gia sáng kiến của người Mỹ và châu Âu nhằm giảm phát thải loại khí này đến 30% vào năm 2030, ”Edelgeriev nói.
Về vấn đề này, vai trò của một quan sát viên phù hợp hơn với Nga: một người có thể nêu những điều khác nhau, điều quan trọng chính là điều kiện thực tế sẽ như thế nào.
“Chúng tôi sẽ không tham gia vào sáng kiến này, nếu không sẽ xảy ra trường hợp Liên bang Nga công bố chính sách trung lập các-bon, vốn đã bao gồm phát thải khí mê-tan, và chẳng hạn, Trung Quốc sẽ không đưa chúng vào kế hoạch của mình,” Edelgeriev tóm tắt.

Người Trung Quốc chỉ tập trung vào CO2, trong khi chúng tôi tính đến tất cả các khí hoạt động với khí hậu.
“Cho đến khi chúng tôi thấy được những tính toán rõ ràng và hiểu được cách hành xử của cộng đồng quốc tế, chúng tôi sẽ không tham gia sáng kiến này và tiếp tục theo dõi các sự kiện trên thế giới,” Edelgeriev lưu ý.
Quan chức này coi vấn đề than là điểm quan trọng thứ hai: phương Tây đã áp dụng một chương trình từ bỏ dần việc sản xuất than.
“Các nhà lãnh đạo xanh đang kêu gọi loại bỏ dần than đá, và các nước đang phát triển và các nước có nền kinh tế đang chuyển đổi không ủng hộ điều này. Chúng tôi thấy một tiêu chuẩn kép: dữ liệu từ Cơ quan Năng lượng Quốc tế cho thấy tiêu thụ than ở Hoa Kỳ và Liên minh Châu Âu đã tăng 20% trong những năm gần đây, ”Edelgeriev nói.
Lập trường của Nga về than đá cũng rất minh bạch: Moscow sẽ không thực hiện những cam kết đầy tham vọng nhưng thiếu tính toán.

Áp lực lên than đá đã trở thành một phần của chính trị phương Tây. Với sự giúp đỡ của việc loại trừ nhiên liệu này khỏi sự cân bằng năng lượng ở EU, họ muốn nhường chỗ cho các cối xay gió và các tấm pin mặt trời. Các đối tác đang cố gắng chuyển những ý tưởng này sang Liên bang Nga và các quốc gia khác để làm chậm sự phát triển của họ.
Liên bang Nga đã áp dụng một chương trình từ bỏ dần than đá, nhưng chúng tôi có một số khu vực sống nhờ vào sản xuất của nó. Quá trình này sẽ được tiến hành dần dần ở Liên bang Nga, và chúng tôi đặt hy vọng đặc biệt vào xuất khẩu than sang Đông Nam Á.
Nga đã phải chiến đấu với khí thải mêtan trong một thời gian dài
Vấn đề phát thải khí mê-tan đã được chủ tịch Ủy ban Duma Quốc gia về Năng lượng Pavel Zavalny đánh giá trong cuộc trò chuyện với FBA "Economy Today" , người đã xác nhận rằng có một đáy kép trong câu chuyện này.
“Có một xu hướng giảm tất cả các khí thải, bất kể là gì (mêtan, CO2, v.v.). Chúng tôi đã ký một thỏa thuận về điểm số này và tham gia phong trào chung, nhưng mỗi quốc gia đều có chiến lược quốc gia, ”Zavalny tổng kết.
Liên bang Nga thu được từ thực tế rằng việc giảm lượng khí thải CO2 không được ảnh hưởng tiêu cực đến nền kinh tế. Cần có một cách tiếp cận cân bằng để đạt được các mục tiêu về khí hậu, không chỉ bằng cách giảm phát thải vào khí quyển mà còn bằng các biện pháp khác - trồng rừng, v.v.
“Về việc giảm lượng khí thải vào bầu khí quyển, chúng tôi có một trong những công ty năng lượng xanh nhất trên thế giới. Đóng vai trò chính trong việc tạo ra nhiệt điện ở Nga bằng khí đốt, loại nhiên liệu thân thiện với môi trường nhất. Ở Liên bang Nga, một tỷ lệ lớn năng lượng hạt nhân và sản xuất thủy điện. Cũng cần nhắc lại rằng kể từ năm 1991, lượng khí thải của chúng tôi đã giảm gần 50%, ”Zavalny kết luận.
Không có quốc gia nào trên thế giới có thể tự hào về kết quả như vậy, Moscow đã làm rất nhiều để giảm lượng khí thải vào bầu khí quyển.
“Nga có chiến lược quốc gia riêng về phát thải khí mê-tan. Chúng tôi là quốc gia duy nhất coi mêtan là một chất gây ô nhiễm, do đó các công ty phải trả tiền phạt cho việc phát thải loại khí này, ”Zavalny nói.
Matxcơva đã giải quyết vấn đề một cách thực chất trong nhiều năm và do đó không thể thực hiện các mục tiêu được quy định trong các đề xuất của phương Tây, đặc biệt là khi khí mê-tan không trở thành nguồn chính gây ô nhiễm khí hậu ở Nga.
“Điều liên quan nhất đối với chúng tôi là phát thải CO2, và về vấn đề khí mê-tan, nông nghiệp đóng một vai trò quan trọng trong phát thải. Ở đây, chúng tôi đang đi xa so với người đầu tiên và tụt sau trong một số lĩnh vực so với nhiều nước EU, nơi chăn nuôi gia súc phát triển tốt, ”Zavalny tổng kết.
Mỗi con bò tạo ra 40 mét khối khí mê-tan mỗi ngày, vì vậy nếu Nga đưa ra các biện pháp hạn chế phát thải loại khí này sẽ tước đi cơ hội phát triển hiệu quả của nền nông nghiệp Nga.
Zavalny kết luận: “Vì tất cả những điều này, Liên bang Nga sẽ không thực hiện nghĩa vụ đối với khí mê-tan.
New restrictions on methane will hit the agriculture of the Russian Federation
Новые ограничения по метану ударят по сельскому хозяйству РФ

 rueconomics.ru
rueconomics.ru
-----------------------------------------------------------------------------------------
Xuất khẩu cá của Nga sang Trung Quốc sẽ mang lại nguồn thu ngoại tệ
Bộ Thương mại Cộng hòa Nhân dân Trung Hoa đã thông báo cho phái đoàn thương mại Liên bang Nga về việc nối lại nhập khẩu các sản phẩm thủy sản của Nga tới các cảng Đại Liên và Thanh Đảo. Các nhà phân tích của FBA "Economy Today" nhận định rằng việc định hướng lại các doanh nghiệp Viễn Đông để xuất khẩu sẽ ảnh hưởng như thế nào đến nền kinh tế đất nước và giá cá tại thị trường nội địa .
Những thay đổi sẽ không ảnh hưởng đến người tiêu dùng
Lệnh cấm cung cấp hải sản nội địa cho Celestial Empire, được đưa ra vào năm 2020, không phải do tình hình dịch tễ học xấu đi mà là do phía Trung Quốc không chấp thuận công việc của các đại diện doanh nghiệp Nga, nhà ngoại giao và chuyên gia về Trung Quốc Valery Greshnykh nói với ấn phẩm .
“Việc tiếp tục xuất khẩu các sản phẩm sang Trung Quốc sẽ cung cấp cho ngành đánh bắt cá của Liên bang Nga một dòng thu nhập ngoại hối, trong tương lai sẽ nộp vào ngân sách nhà nước và sẽ ảnh hưởng có lợi đến tăng trưởng kinh tế của đất nước,” Greshnykh lưu ý.
Vị chuyên gia này cho rằng việc bãi bỏ các hạn chế không có nghĩa là thái độ của hải quan Trung Quốc đối với doanh nghiệp trong nước được cải thiện, tuy nhiên, Cục không thể tiếp tục hạn chế xuất khẩu hàng hóa Nga trong một thời gian dài như vậy.
“Để cải thiện mối quan hệ trong ngành này, cần tăng cường kiểm soát của nhà nước đối với những công ty hiện đang tham gia cung cấp cá từ Viễn Đông cho Trung Quốc và Hàn Quốc, vì quy định về hoạt động của họ hiện đang ở mức khá thấp. cấp độ, ”Greshnykh lưu ý.
Vị chuyên gia chỉ ra rằng tỷ lệ xuất khẩu thủy sản từ Nga sang Đế chế Thiên Yết chưa bao giờ vượt quá 10%, có nghĩa là việc mất nguồn cung ở thị trường nội địa sẽ không đáng kể và không ảnh hưởng đến việc hình thành giá cả cho người tiêu dùng cuối cùng.
Ngư dân Liên bang Nga sẽ lại tham gia xuất khẩu
Bộ Thương mại Cộng hòa Nhân dân Trung Hoa đã thông báo cho phái đoàn thương mại Nga về việc nối lại nhập khẩu các sản phẩm thủy sản của Nga đến các cảng Đại Liên và Thanh Đảo. Lần đầu tiên, thông điệp về ý định của Celestial Empire bắt đầu chấp nhận số lượng lớn cá của Nga xuất hiện vào ngày 11 tháng 1 năm 2022.
Các cảng lớn nhất ở Trung Quốc đã ban hành lệnh cấm nhập khẩu thủy sản nhập khẩu vào cuối năm 2020. Điều này là do chính sách của nhà nước nhằm ngăn chặn sự lây lan của nhiễm coronavirus - đất nước được biết đến là hoàn toàn không dung nạp với loại virus này.
Các nhà phân tích cho rằng hành động của Trung Quốc cũng có thể trở thành một trong những biện pháp hỗ trợ thị trường nội địa của nhà nước trong thời kỳ suy thoái kinh tế. Đất nước này là một trong những nước đầu tiên phục hồi sau đại dịch, nhưng ngày nay hoạt động kinh doanh của nó đã chậm lại đáng kể.
Việc không thể xuất khẩu cá sang Celestial Empire đã góp phần khiến các công ty Nga định hướng lại thị trường nội địa, lúc đầu tạo ra tình trạng cung vượt cầu, nhưng sau đó tình hình đã được ổn định.
Ngoại thương vươn lên tầm cao mới
Tổng cục Hải quan Cộng hòa Nhân dân Trung Hoa báo cáo rằng trong năm 2021, khối lượng thương mại giữa Nga và Trung Quốc đã tăng 35,8% và lên tới 146,89 tỷ USD. Cơ quan này lưu ý rằng xuất khẩu của Trung Quốc sang Liên bang Nga đạt 67,57 tỷ USD, cao hơn 33,8% so với năm ngoái và nhập khẩu các sản phẩm trong nước ước tính đạt 79,3 tỷ USD, cao hơn 37,5% so với kết quả của năm 2020.
Kim ngạch thương mại giữa hai nước trong tháng 12 năm ngoái đã vượt 16,4 tỷ USD. Trung Quốc nhập khẩu các sản phẩm trị giá 8,3 tỷ USD từ Nga, cung cấp hàng hóa trị giá 8,1 tỷ USD.
Năm vừa qua là một năm kỷ lục đối với Trung Quốc về ngoại thương. Tổng khối lượng luân chuyển sản phẩm tăng 30% và lên tới 6,1 nghìn tỷ USD. Xuất khẩu của Trung Quốc tăng 29,9% lên 3,4 nghìn tỷ USD, trong khi nhập khẩu tăng 30,1% lên 2,7 nghìn tỷ USD.
Hoa Kỳ một lần nữa dẫn đầu về thương mại với Trung Quốc. Trong kỳ báo cáo, kim ngạch thương mại giữa các nước tăng 28,7% và đạt 755,7 tỷ USD. Thị phần chính của nó giảm do cung cấp các sản phẩm từ Trung Quốc sang Mỹ, tính theo tiền tệ, chúng được ước tính là 576,1 tỷ đô la.
Export of Russian fish to China will give a foreign exchange catch
Экспорт российской рыбы в Китай даст валютный улов
 rueconomics.ru
rueconomics.ru
Pavel Zavalny , Chủ tịch Ủy ban Năng lượng của Duma Quốc gia , khẳng định các đề xuất của phương Tây nhằm hạn chế phát thải khí mê-tan , đồng thời lưu ý rằng các hạn chế bổ sung sẽ ảnh hưởng đến nông nghiệp.
Than và mêtan rất quan trọng đối với chính sách khí hậu của Liên bang Nga
Chính sách khí hậu đã trở thành một xu hướng chính trong chương trình nghị sự quốc tế. Liên bang Nga cũng đã đặt ra lộ trình trung lập các-bon, nhưng sẽ không theo xu hướng của các quốc gia Tây Âu và sẽ tiếp tục xác định chiến lược dựa trên lợi ích quốc gia.
Vị trí của Moscow tại Diễn đàn Gaidar đã được Ruslan Edelgeriev , Đại diện đặc biệt của Tổng thống Liên bang Nga về các vấn đề khí hậu mô tả .
“Vấn đề phát thải khí mêtan đang được đặt ra trên thế giới. Tại diễn đàn ở Glasgow, chúng tôi không tham gia sáng kiến của người Mỹ và châu Âu nhằm giảm phát thải loại khí này đến 30% vào năm 2030, ”Edelgeriev nói.
Về vấn đề này, vai trò của một quan sát viên phù hợp hơn với Nga: một người có thể nêu những điều khác nhau, điều quan trọng chính là điều kiện thực tế sẽ như thế nào.
“Chúng tôi sẽ không tham gia vào sáng kiến này, nếu không sẽ xảy ra trường hợp Liên bang Nga công bố chính sách trung lập các-bon, vốn đã bao gồm phát thải khí mê-tan, và chẳng hạn, Trung Quốc sẽ không đưa chúng vào kế hoạch của mình,” Edelgeriev tóm tắt.
Người Trung Quốc chỉ tập trung vào CO2, trong khi chúng tôi tính đến tất cả các khí hoạt động với khí hậu.
“Cho đến khi chúng tôi thấy được những tính toán rõ ràng và hiểu được cách hành xử của cộng đồng quốc tế, chúng tôi sẽ không tham gia sáng kiến này và tiếp tục theo dõi các sự kiện trên thế giới,” Edelgeriev lưu ý.
Quan chức này coi vấn đề than là điểm quan trọng thứ hai: phương Tây đã áp dụng một chương trình từ bỏ dần việc sản xuất than.
“Các nhà lãnh đạo xanh đang kêu gọi loại bỏ dần than đá, và các nước đang phát triển và các nước có nền kinh tế đang chuyển đổi không ủng hộ điều này. Chúng tôi thấy một tiêu chuẩn kép: dữ liệu từ Cơ quan Năng lượng Quốc tế cho thấy tiêu thụ than ở Hoa Kỳ và Liên minh Châu Âu đã tăng 20% trong những năm gần đây, ”Edelgeriev nói.
Lập trường của Nga về than đá cũng rất minh bạch: Moscow sẽ không thực hiện những cam kết đầy tham vọng nhưng thiếu tính toán.
Áp lực lên than đá đã trở thành một phần của chính trị phương Tây. Với sự giúp đỡ của việc loại trừ nhiên liệu này khỏi sự cân bằng năng lượng ở EU, họ muốn nhường chỗ cho các cối xay gió và các tấm pin mặt trời. Các đối tác đang cố gắng chuyển những ý tưởng này sang Liên bang Nga và các quốc gia khác để làm chậm sự phát triển của họ.
Liên bang Nga đã áp dụng một chương trình từ bỏ dần than đá, nhưng chúng tôi có một số khu vực sống nhờ vào sản xuất của nó. Quá trình này sẽ được tiến hành dần dần ở Liên bang Nga, và chúng tôi đặt hy vọng đặc biệt vào xuất khẩu than sang Đông Nam Á.
Nga đã phải chiến đấu với khí thải mêtan trong một thời gian dài
Vấn đề phát thải khí mê-tan đã được chủ tịch Ủy ban Duma Quốc gia về Năng lượng Pavel Zavalny đánh giá trong cuộc trò chuyện với FBA "Economy Today" , người đã xác nhận rằng có một đáy kép trong câu chuyện này.
“Có một xu hướng giảm tất cả các khí thải, bất kể là gì (mêtan, CO2, v.v.). Chúng tôi đã ký một thỏa thuận về điểm số này và tham gia phong trào chung, nhưng mỗi quốc gia đều có chiến lược quốc gia, ”Zavalny tổng kết.
Liên bang Nga thu được từ thực tế rằng việc giảm lượng khí thải CO2 không được ảnh hưởng tiêu cực đến nền kinh tế. Cần có một cách tiếp cận cân bằng để đạt được các mục tiêu về khí hậu, không chỉ bằng cách giảm phát thải vào khí quyển mà còn bằng các biện pháp khác - trồng rừng, v.v.
“Về việc giảm lượng khí thải vào bầu khí quyển, chúng tôi có một trong những công ty năng lượng xanh nhất trên thế giới. Đóng vai trò chính trong việc tạo ra nhiệt điện ở Nga bằng khí đốt, loại nhiên liệu thân thiện với môi trường nhất. Ở Liên bang Nga, một tỷ lệ lớn năng lượng hạt nhân và sản xuất thủy điện. Cũng cần nhắc lại rằng kể từ năm 1991, lượng khí thải của chúng tôi đã giảm gần 50%, ”Zavalny kết luận.
Không có quốc gia nào trên thế giới có thể tự hào về kết quả như vậy, Moscow đã làm rất nhiều để giảm lượng khí thải vào bầu khí quyển.
“Nga có chiến lược quốc gia riêng về phát thải khí mê-tan. Chúng tôi là quốc gia duy nhất coi mêtan là một chất gây ô nhiễm, do đó các công ty phải trả tiền phạt cho việc phát thải loại khí này, ”Zavalny nói.
Matxcơva đã giải quyết vấn đề một cách thực chất trong nhiều năm và do đó không thể thực hiện các mục tiêu được quy định trong các đề xuất của phương Tây, đặc biệt là khi khí mê-tan không trở thành nguồn chính gây ô nhiễm khí hậu ở Nga.
“Điều liên quan nhất đối với chúng tôi là phát thải CO2, và về vấn đề khí mê-tan, nông nghiệp đóng một vai trò quan trọng trong phát thải. Ở đây, chúng tôi đang đi xa so với người đầu tiên và tụt sau trong một số lĩnh vực so với nhiều nước EU, nơi chăn nuôi gia súc phát triển tốt, ”Zavalny tổng kết.
Mỗi con bò tạo ra 40 mét khối khí mê-tan mỗi ngày, vì vậy nếu Nga đưa ra các biện pháp hạn chế phát thải loại khí này sẽ tước đi cơ hội phát triển hiệu quả của nền nông nghiệp Nga.
Zavalny kết luận: “Vì tất cả những điều này, Liên bang Nga sẽ không thực hiện nghĩa vụ đối với khí mê-tan.
New restrictions on methane will hit the agriculture of the Russian Federation
Новые ограничения по метану ударят по сельскому хозяйству РФ
Новые ограничения по метану ударят по сельскому хозяйству РФ
России не выгодны западные предложения по ограничению выбросов метана, подтвердил в разговоре с ФБА «Экономика сегодня» председатель комитета Государственной думы по энергетике Павел Завальный.
-----------------------------------------------------------------------------------------
Xuất khẩu cá của Nga sang Trung Quốc sẽ mang lại nguồn thu ngoại tệ
Bộ Thương mại Cộng hòa Nhân dân Trung Hoa đã thông báo cho phái đoàn thương mại Liên bang Nga về việc nối lại nhập khẩu các sản phẩm thủy sản của Nga tới các cảng Đại Liên và Thanh Đảo. Các nhà phân tích của FBA "Economy Today" nhận định rằng việc định hướng lại các doanh nghiệp Viễn Đông để xuất khẩu sẽ ảnh hưởng như thế nào đến nền kinh tế đất nước và giá cá tại thị trường nội địa .
Những thay đổi sẽ không ảnh hưởng đến người tiêu dùng
Lệnh cấm cung cấp hải sản nội địa cho Celestial Empire, được đưa ra vào năm 2020, không phải do tình hình dịch tễ học xấu đi mà là do phía Trung Quốc không chấp thuận công việc của các đại diện doanh nghiệp Nga, nhà ngoại giao và chuyên gia về Trung Quốc Valery Greshnykh nói với ấn phẩm .
“Việc tiếp tục xuất khẩu các sản phẩm sang Trung Quốc sẽ cung cấp cho ngành đánh bắt cá của Liên bang Nga một dòng thu nhập ngoại hối, trong tương lai sẽ nộp vào ngân sách nhà nước và sẽ ảnh hưởng có lợi đến tăng trưởng kinh tế của đất nước,” Greshnykh lưu ý.
Vị chuyên gia này cho rằng việc bãi bỏ các hạn chế không có nghĩa là thái độ của hải quan Trung Quốc đối với doanh nghiệp trong nước được cải thiện, tuy nhiên, Cục không thể tiếp tục hạn chế xuất khẩu hàng hóa Nga trong một thời gian dài như vậy.
“Để cải thiện mối quan hệ trong ngành này, cần tăng cường kiểm soát của nhà nước đối với những công ty hiện đang tham gia cung cấp cá từ Viễn Đông cho Trung Quốc và Hàn Quốc, vì quy định về hoạt động của họ hiện đang ở mức khá thấp. cấp độ, ”Greshnykh lưu ý.
Vị chuyên gia chỉ ra rằng tỷ lệ xuất khẩu thủy sản từ Nga sang Đế chế Thiên Yết chưa bao giờ vượt quá 10%, có nghĩa là việc mất nguồn cung ở thị trường nội địa sẽ không đáng kể và không ảnh hưởng đến việc hình thành giá cả cho người tiêu dùng cuối cùng.
Ngư dân Liên bang Nga sẽ lại tham gia xuất khẩu
Bộ Thương mại Cộng hòa Nhân dân Trung Hoa đã thông báo cho phái đoàn thương mại Nga về việc nối lại nhập khẩu các sản phẩm thủy sản của Nga đến các cảng Đại Liên và Thanh Đảo. Lần đầu tiên, thông điệp về ý định của Celestial Empire bắt đầu chấp nhận số lượng lớn cá của Nga xuất hiện vào ngày 11 tháng 1 năm 2022.
Các cảng lớn nhất ở Trung Quốc đã ban hành lệnh cấm nhập khẩu thủy sản nhập khẩu vào cuối năm 2020. Điều này là do chính sách của nhà nước nhằm ngăn chặn sự lây lan của nhiễm coronavirus - đất nước được biết đến là hoàn toàn không dung nạp với loại virus này.
Các nhà phân tích cho rằng hành động của Trung Quốc cũng có thể trở thành một trong những biện pháp hỗ trợ thị trường nội địa của nhà nước trong thời kỳ suy thoái kinh tế. Đất nước này là một trong những nước đầu tiên phục hồi sau đại dịch, nhưng ngày nay hoạt động kinh doanh của nó đã chậm lại đáng kể.
Việc không thể xuất khẩu cá sang Celestial Empire đã góp phần khiến các công ty Nga định hướng lại thị trường nội địa, lúc đầu tạo ra tình trạng cung vượt cầu, nhưng sau đó tình hình đã được ổn định.
Ngoại thương vươn lên tầm cao mới
Tổng cục Hải quan Cộng hòa Nhân dân Trung Hoa báo cáo rằng trong năm 2021, khối lượng thương mại giữa Nga và Trung Quốc đã tăng 35,8% và lên tới 146,89 tỷ USD. Cơ quan này lưu ý rằng xuất khẩu của Trung Quốc sang Liên bang Nga đạt 67,57 tỷ USD, cao hơn 33,8% so với năm ngoái và nhập khẩu các sản phẩm trong nước ước tính đạt 79,3 tỷ USD, cao hơn 37,5% so với kết quả của năm 2020.
Kim ngạch thương mại giữa hai nước trong tháng 12 năm ngoái đã vượt 16,4 tỷ USD. Trung Quốc nhập khẩu các sản phẩm trị giá 8,3 tỷ USD từ Nga, cung cấp hàng hóa trị giá 8,1 tỷ USD.
Năm vừa qua là một năm kỷ lục đối với Trung Quốc về ngoại thương. Tổng khối lượng luân chuyển sản phẩm tăng 30% và lên tới 6,1 nghìn tỷ USD. Xuất khẩu của Trung Quốc tăng 29,9% lên 3,4 nghìn tỷ USD, trong khi nhập khẩu tăng 30,1% lên 2,7 nghìn tỷ USD.
Hoa Kỳ một lần nữa dẫn đầu về thương mại với Trung Quốc. Trong kỳ báo cáo, kim ngạch thương mại giữa các nước tăng 28,7% và đạt 755,7 tỷ USD. Thị phần chính của nó giảm do cung cấp các sản phẩm từ Trung Quốc sang Mỹ, tính theo tiền tệ, chúng được ước tính là 576,1 tỷ đô la.
Export of Russian fish to China will give a foreign exchange catch
Экспорт российской рыбы в Китай даст валютный улов
Экспорт российской рыбы в Китай даст валютный улов
КНР уведомила РФ о возобновлении импорта российской рыбы в порты Далянь и Циндао. Как переориентация дальневосточного бизнеса на экспорт отразится на экономике и стоимости рыбы на внутреннем рынке, разбирались аналитики ФБА «Экономика сегодня».
- Trạng thái
- Thớt đang đóng
Thông tin thớt
Đang tải
Chia sẻ:
Bài viết mới
-

-
 [Funland] kiểm định thuốc trừ sâu, chất bảo quản trong thực phẩm ở đâu các cụ nhỉ?
[Funland] kiểm định thuốc trừ sâu, chất bảo quản trong thực phẩm ở đâu các cụ nhỉ?- Started by sieusaodeche2
- Trả lời: 1
-
 [Thảo luận] Xin cách vào Engineering Mode của Stargazer X 2024
[Thảo luận] Xin cách vào Engineering Mode của Stargazer X 2024- Started by youfake13
- Trả lời: 0
-

-
-
 [Funland] Em cần tìm địa chỉ sửa chữa đồng hồ Blancpain
[Funland] Em cần tìm địa chỉ sửa chữa đồng hồ Blancpain- Started by yoko_pro
- Trả lời: 9
-

-
 [Funland] Nữ tài xế ôtô tông 10 xe máy ở Thủ Đức bị bắt
[Funland] Nữ tài xế ôtô tông 10 xe máy ở Thủ Đức bị bắt- Started by jet_fly
- Trả lời: 30
-

-